About Stewart Hand
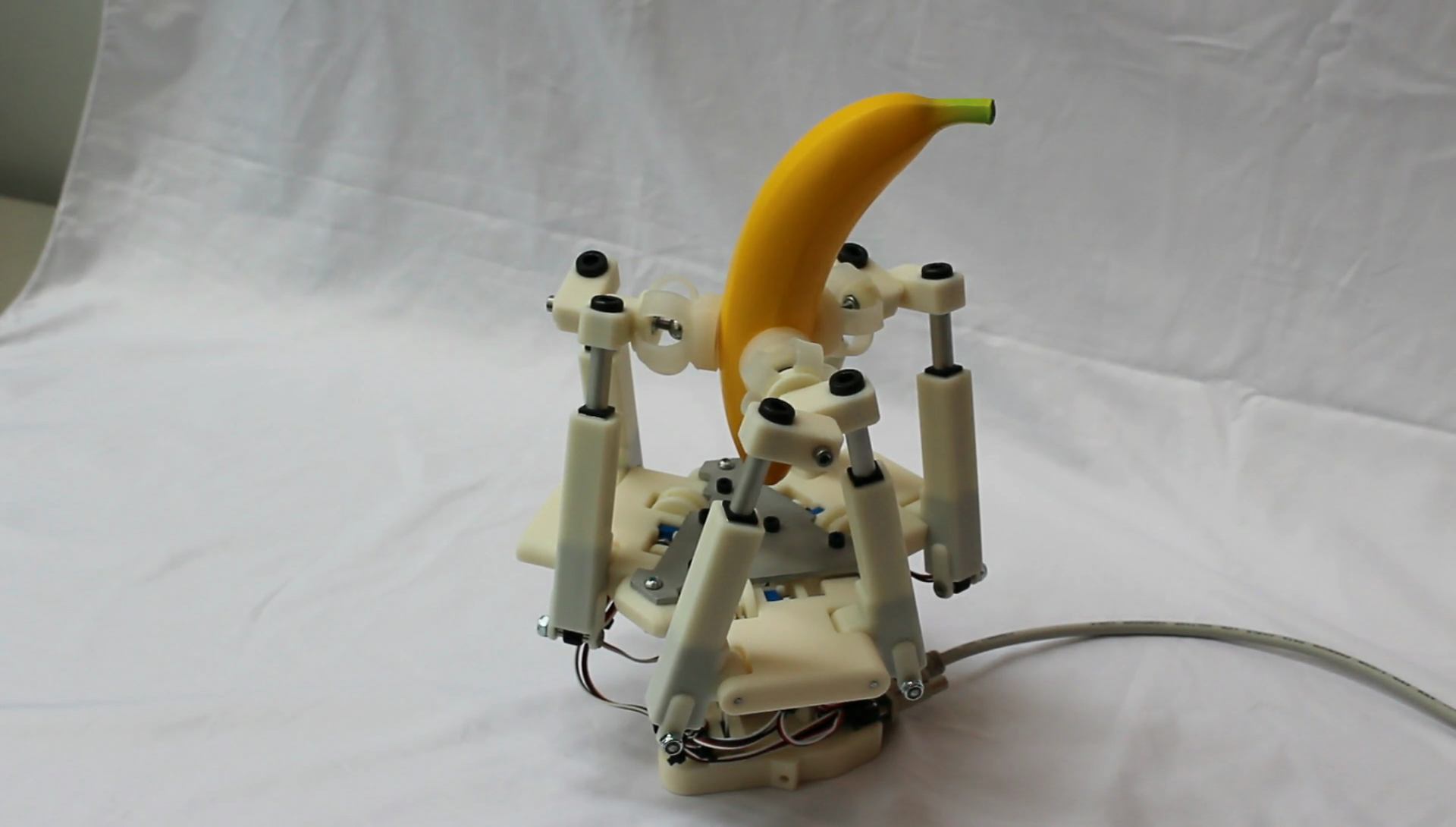
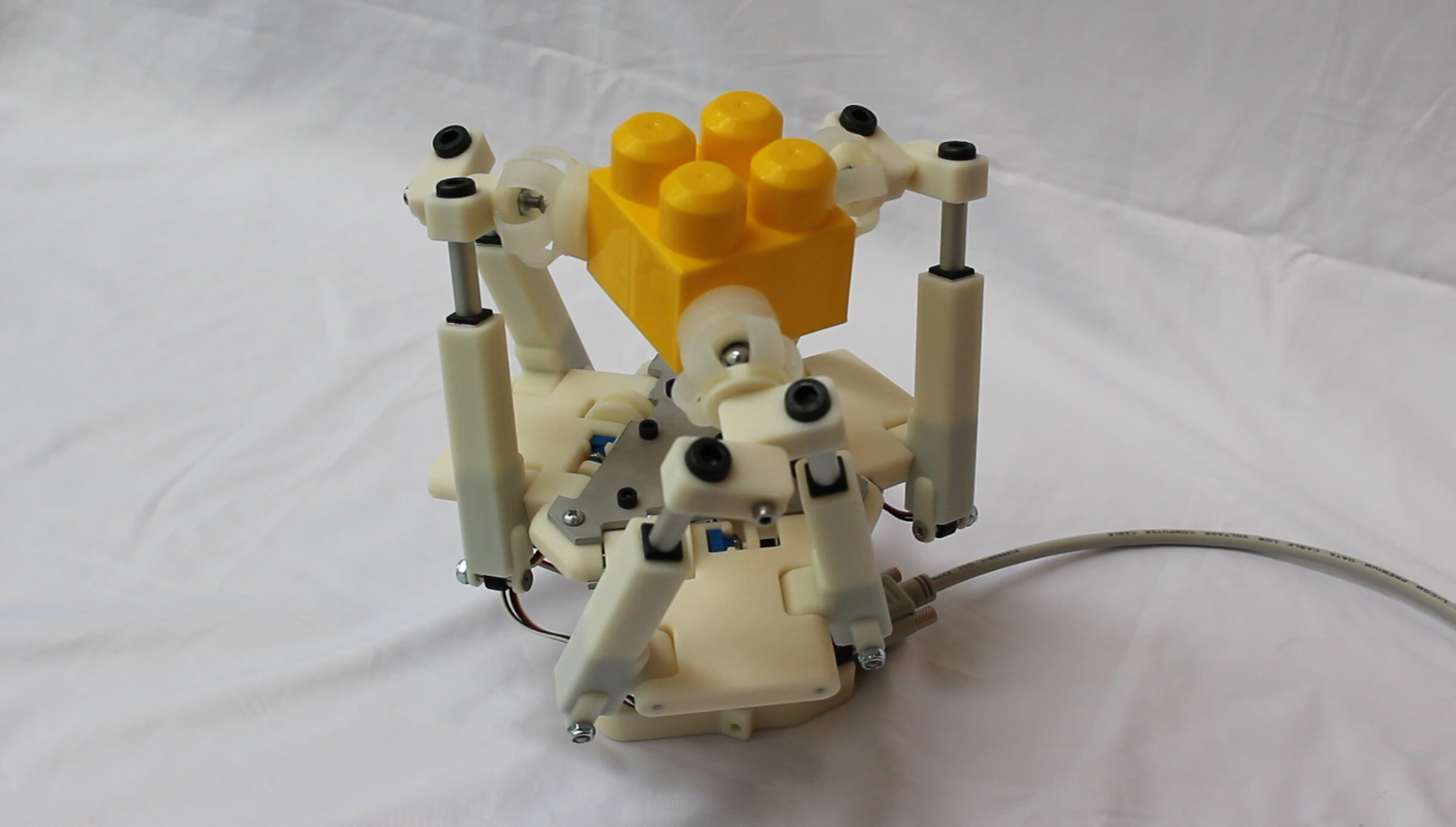
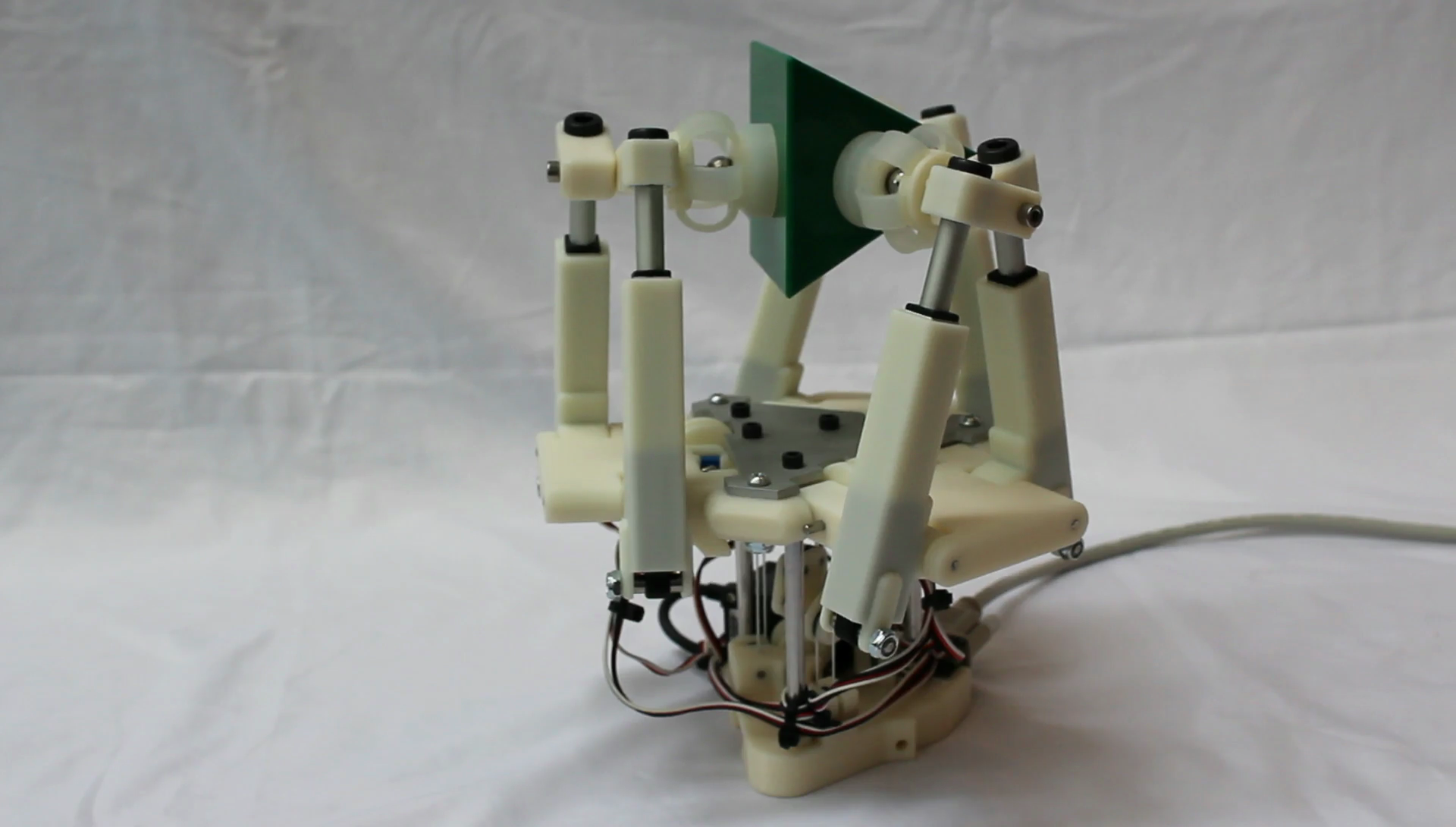
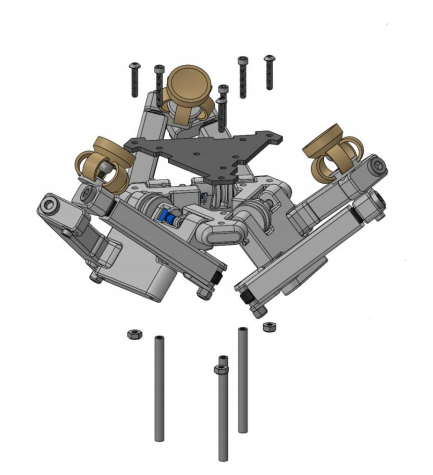
The Stewart Hand is a dexterous hand designed for 6-DOF within-hand manipulation. Its non-anthropomorphic design draws inspiration from the Stewart-Gough platform parallel mechanism. This simple kinematic structure allows for straightforward, accurate control with minimal sensing.
C. M. McCann*, V. V. Patel*, and A. M. Dollar
"The Stewart Hand: A Highly Dexterous 6-DOF Manipulator Based on the Stewart-Gough Platform," IEEE Robotics and Automation Magazine (RAM), Special Issue on Emerging Paradigms in Robotic Manipulation: from the Lab to the Productive World, 2021.
C. M. McCann and A. M. Dollar
"Analysis and Dimensional Synthesis of a Robotic Hand Based on the Stewart-Gough Platform," ASME International Design Engineering Technical Conferences & Computers and Information in Engineering Conference (IDETC/CIE), 2018.
C. M. McCann and A. M. Dollar
"Design of a Stewart Platform-Inspired Dexterous Hand for 6-DOF Within-Hand Manipulation," IEEE International Conference on Intelligent Robotics (IROS), 2017.