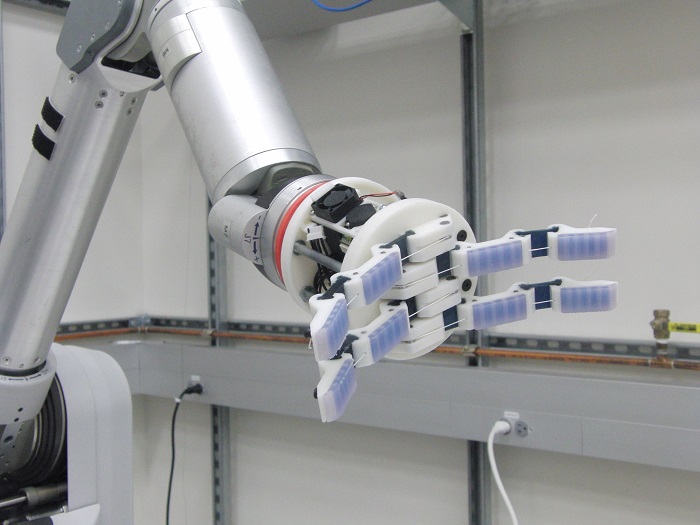
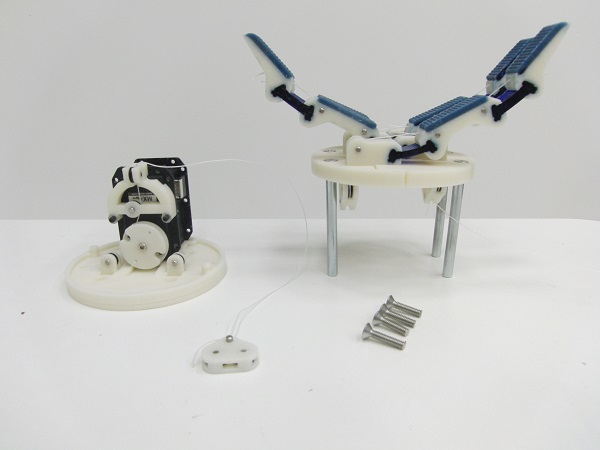
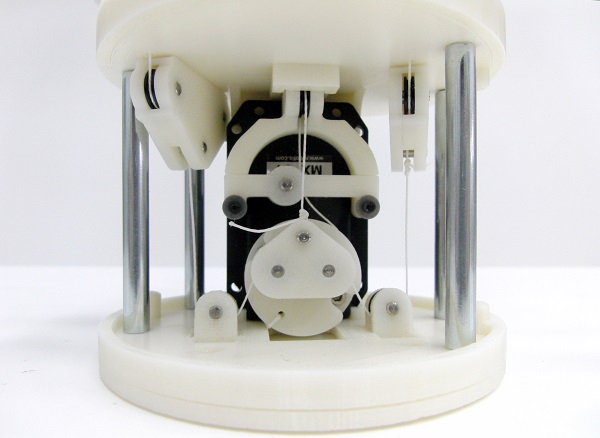
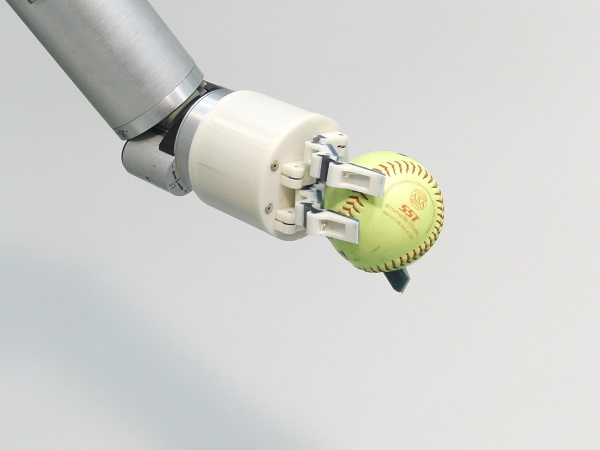
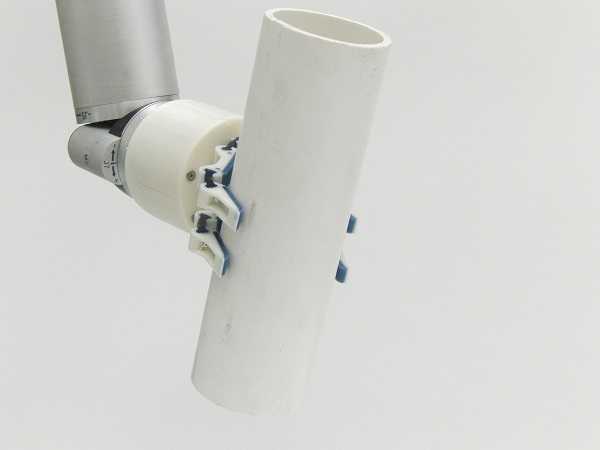
The Model T is the initial released design of the Yale OpenHand Project, based on the original SDM Hand. It consists of four underactuated fingers with compliant flexure joints, driven by a single actuator through a pulley tree differential. During grasp acquisition, each finger will continue to move until the links make contact with the object, reducing the need for sensors or feedback control. The fabrication process for the fingers is the basis for all the designs made available through the Yale OpenHand Project.
Variations of the original SDM hand have been featured on aerial grasping platforms and iRobot batting practice.