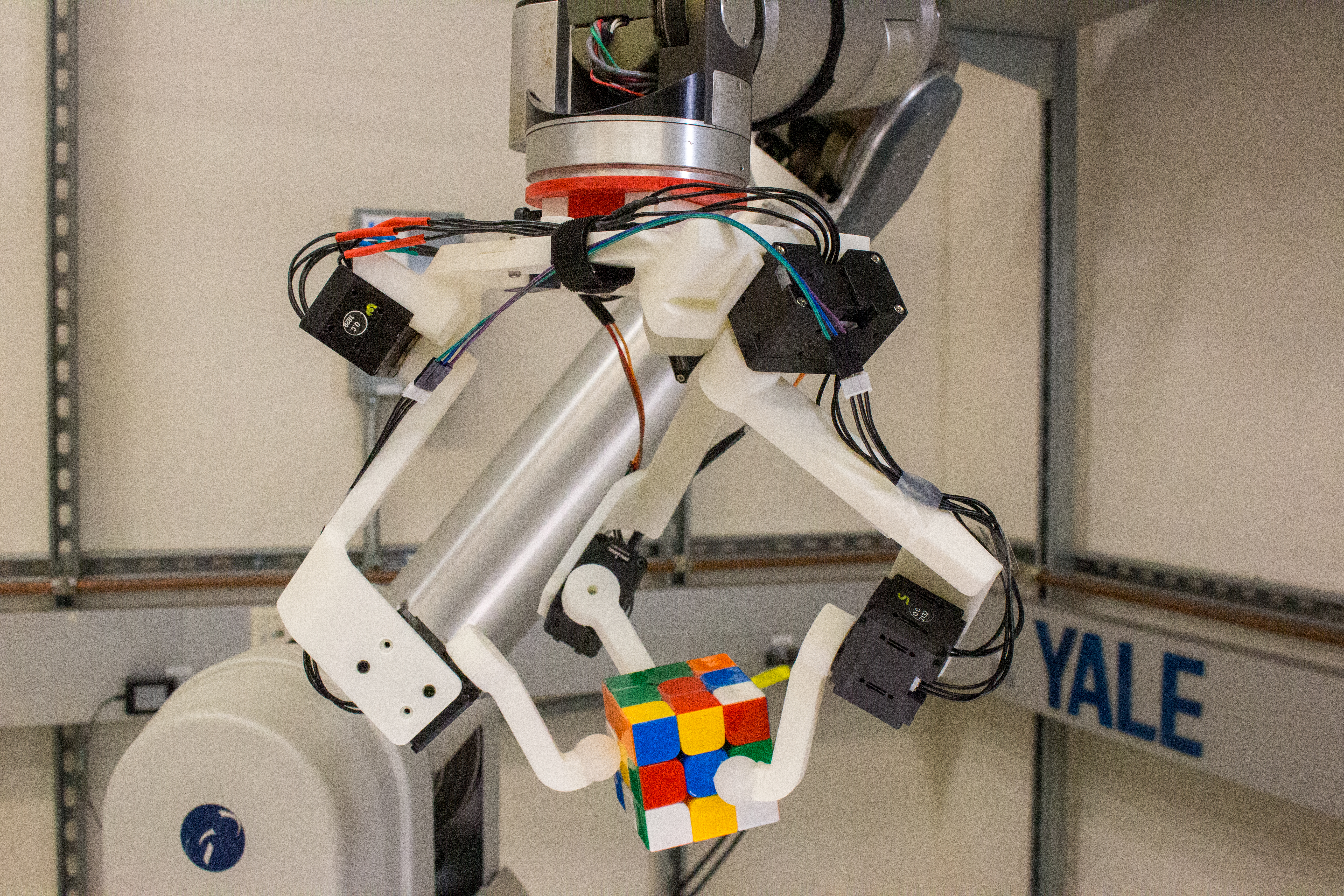
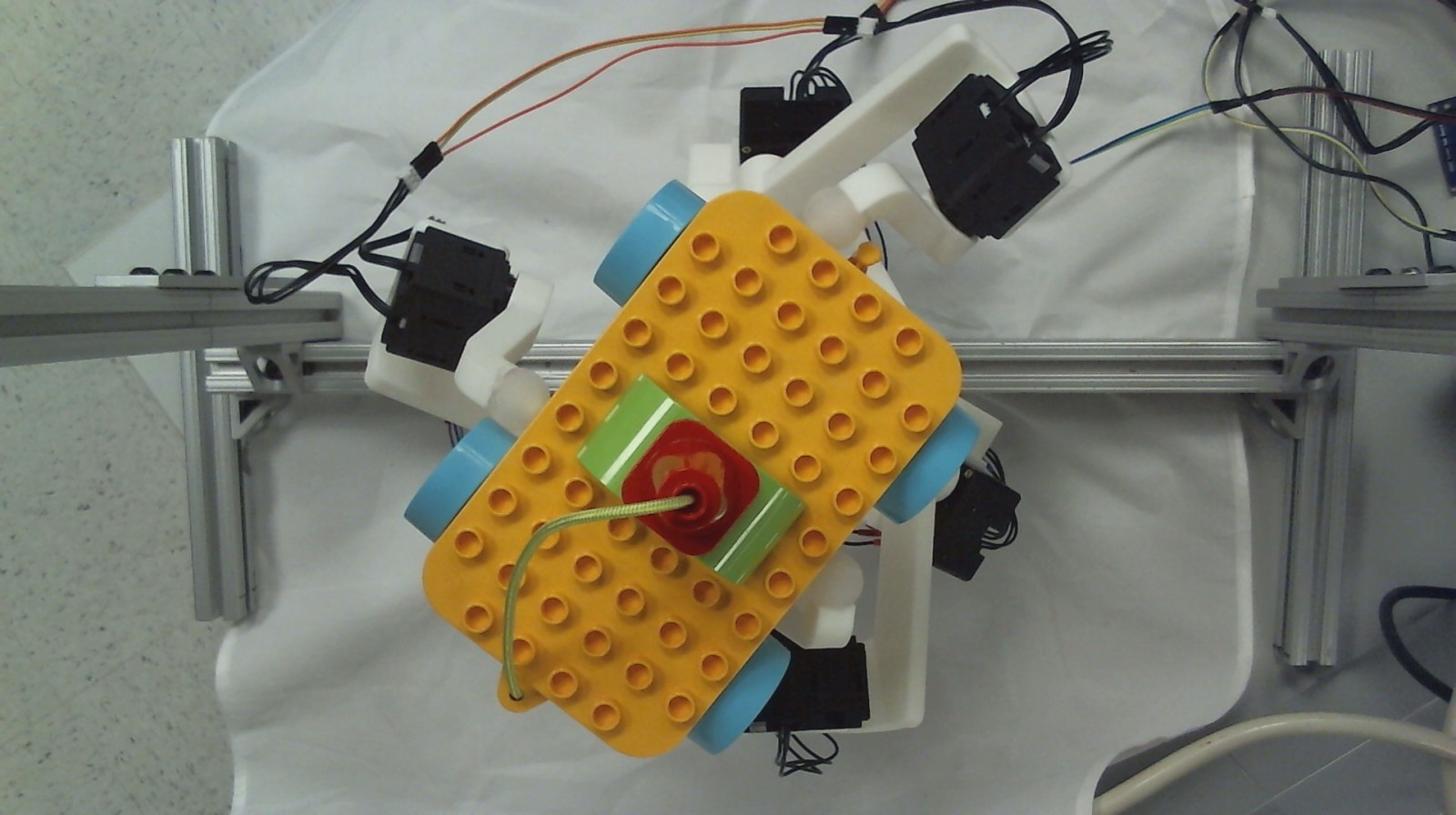
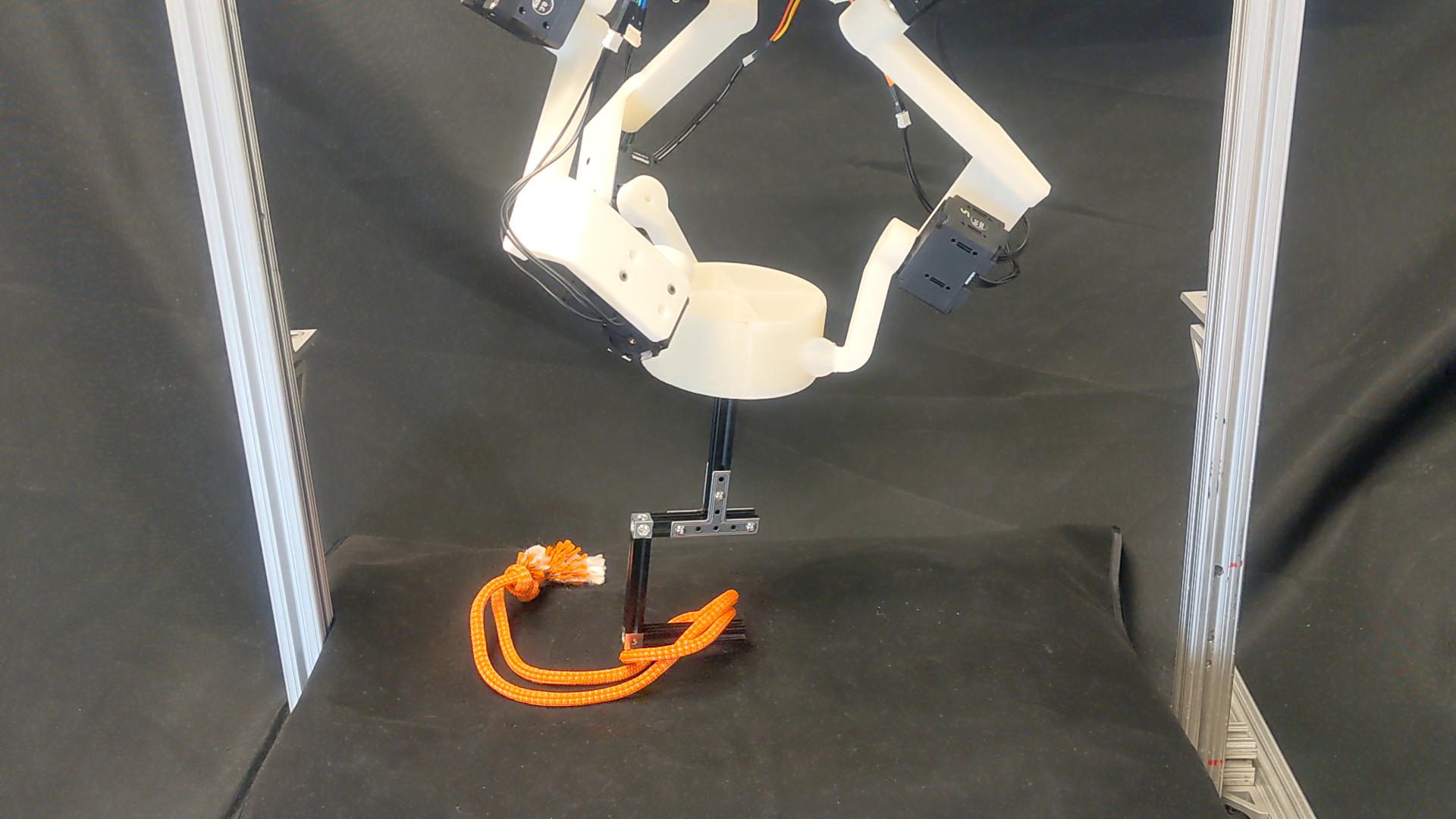
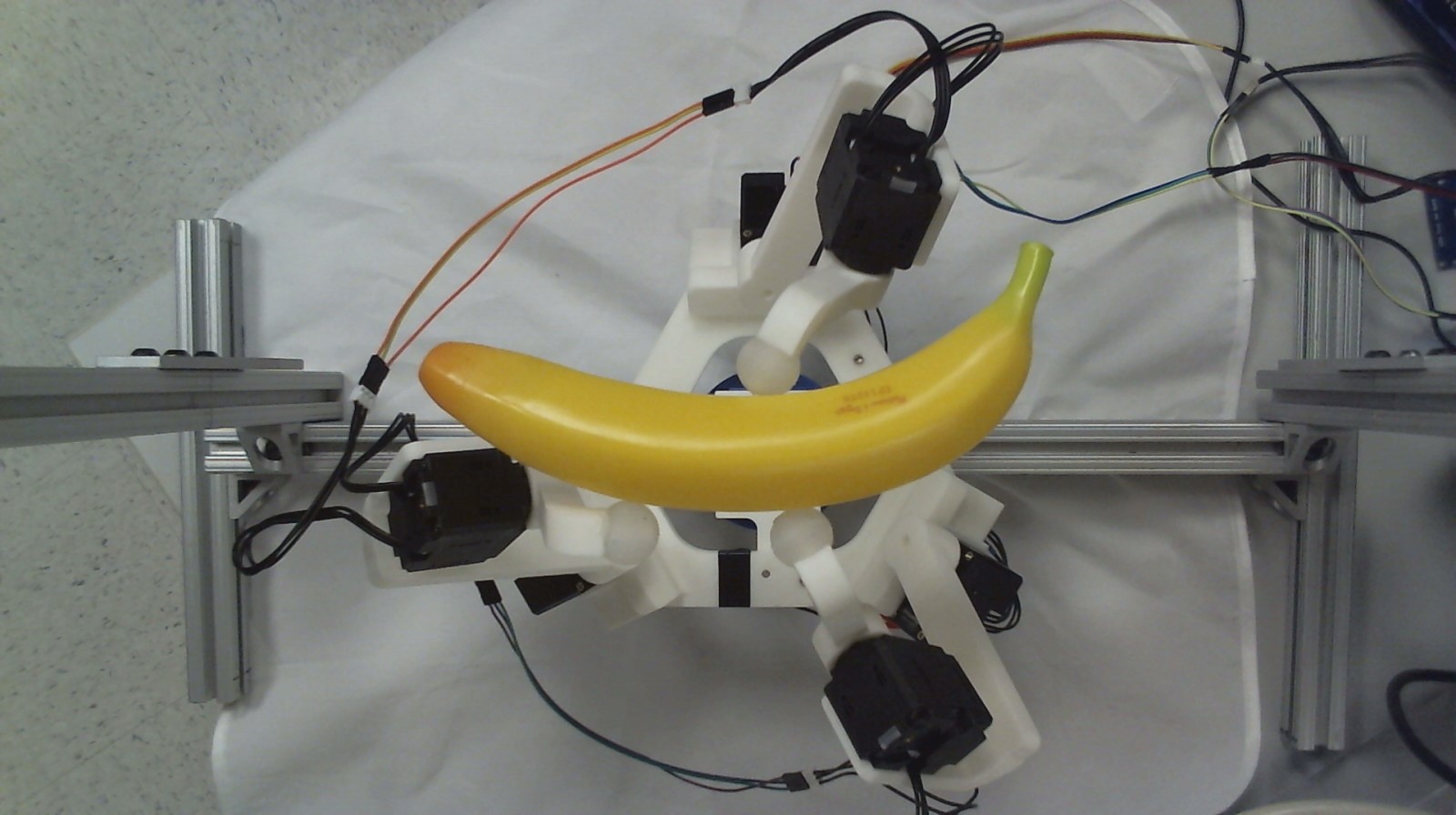
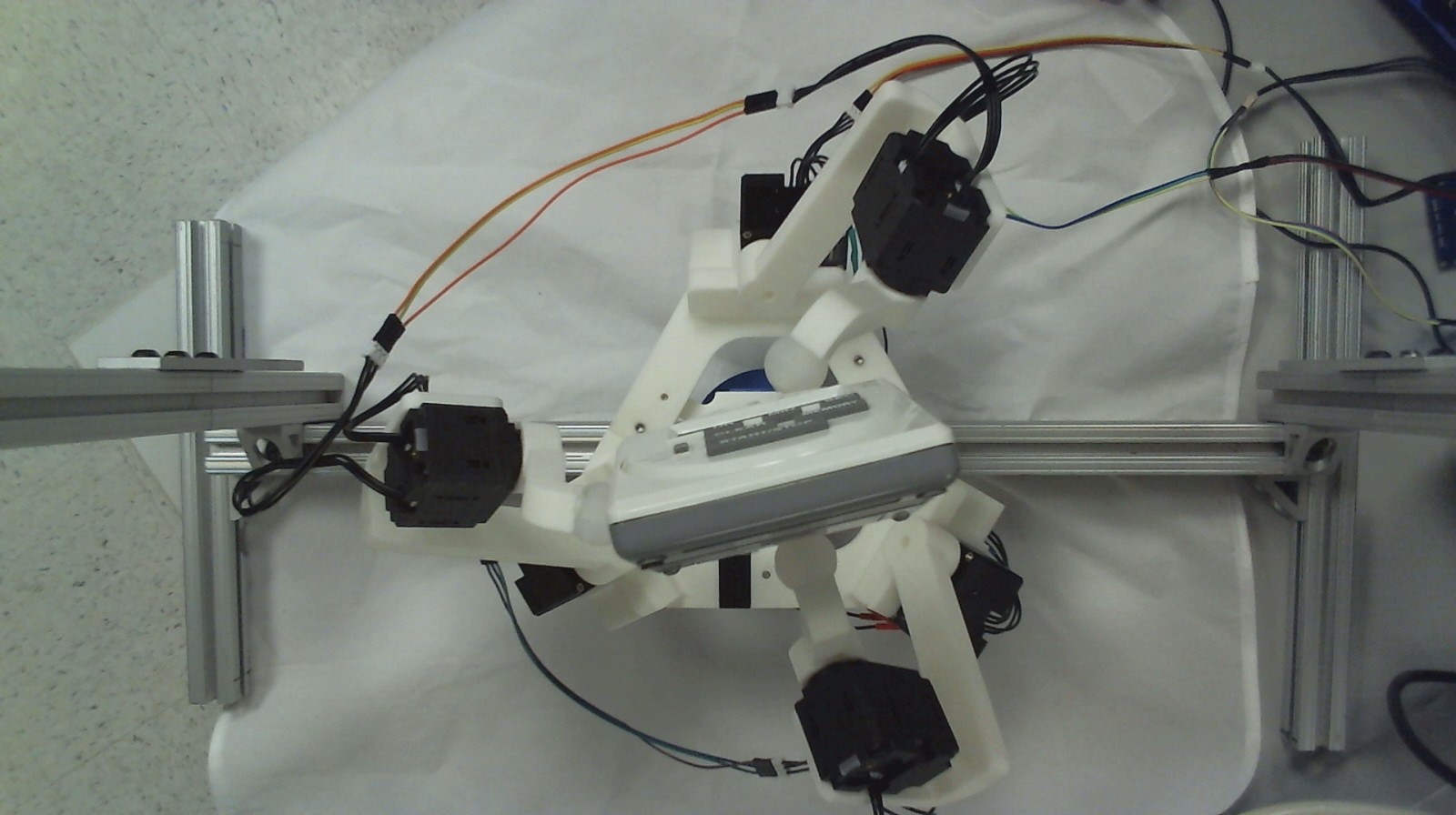
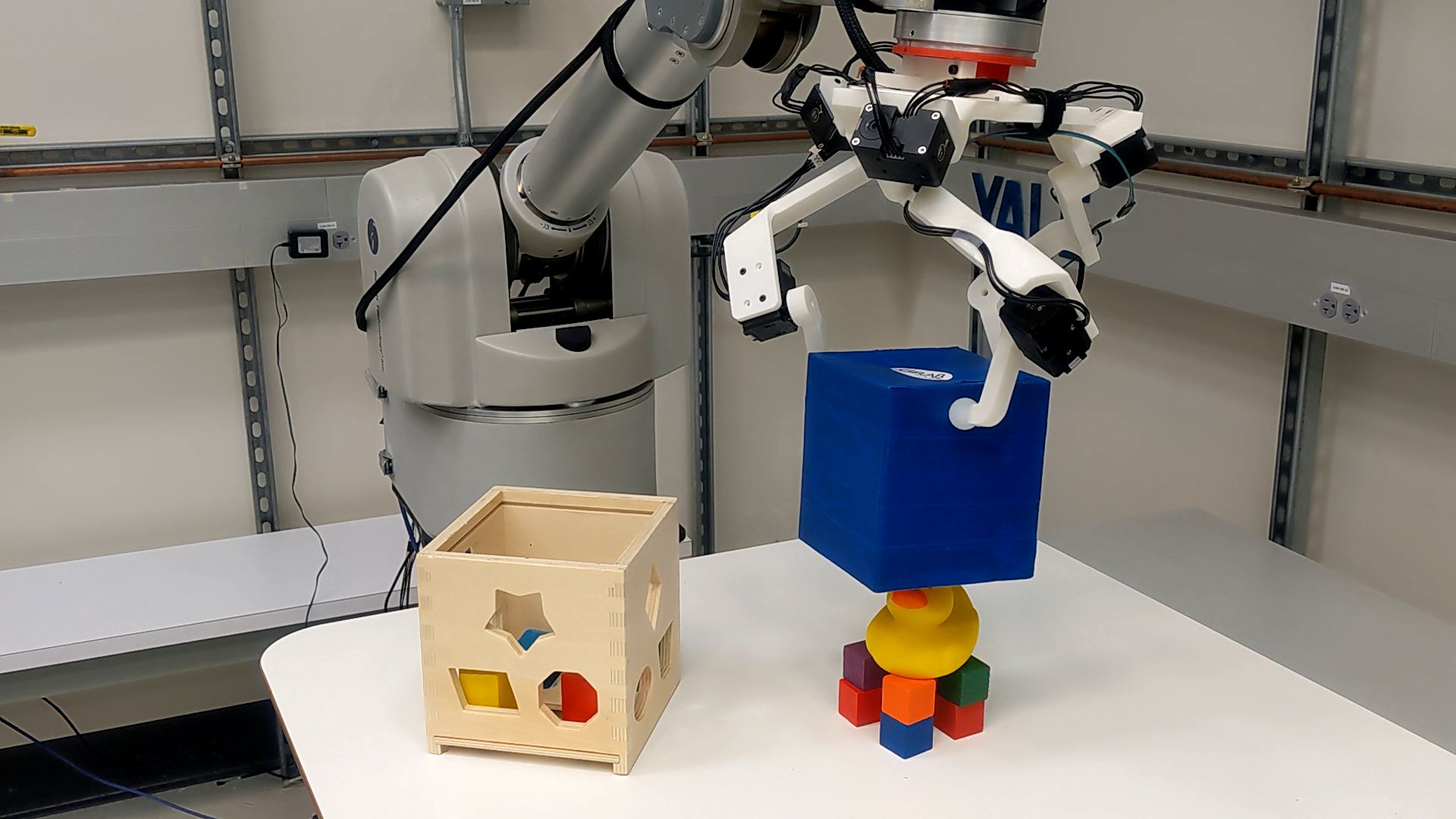
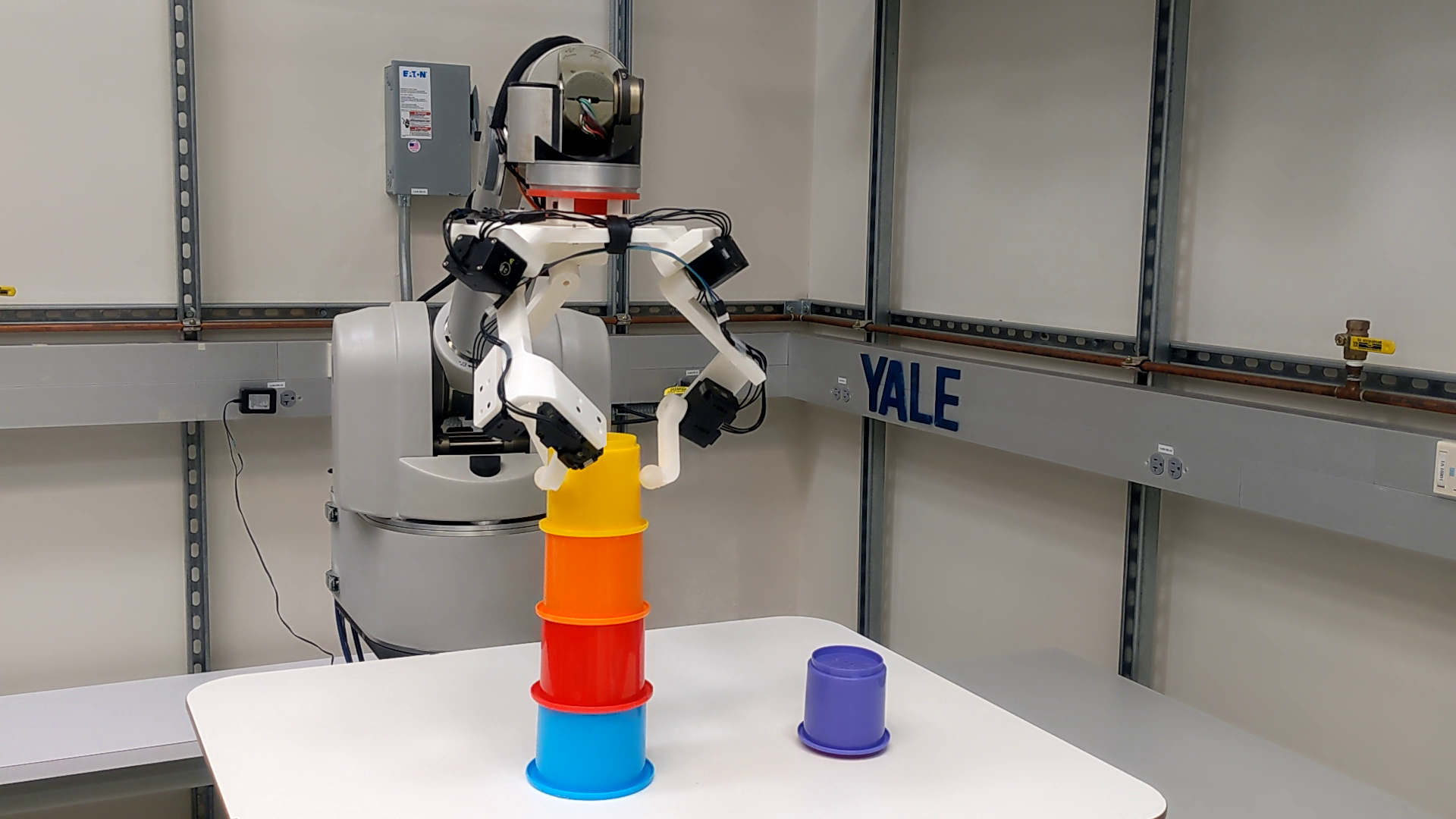
The Sphinx hand is based on a spherical parallel architecture that can both grasp and rotate a wide range of objects in all three axes, combining much of the function of traditional wrists and grippers. The hand mechanism allows for pure spherical rotations of the grasped object about a known fixed point close to the object, thus avoiding parasitic translations and inefficient arm motions. This point also stays fixed with respect to the hand, and is independent of object shape, pose, or initial grasp.