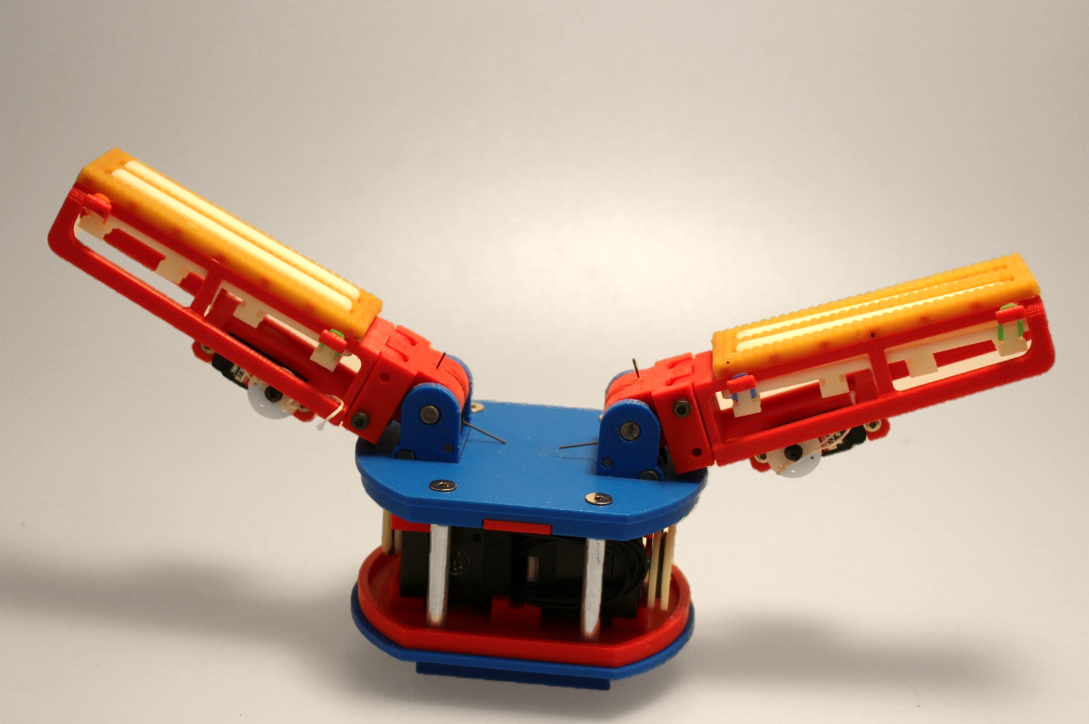
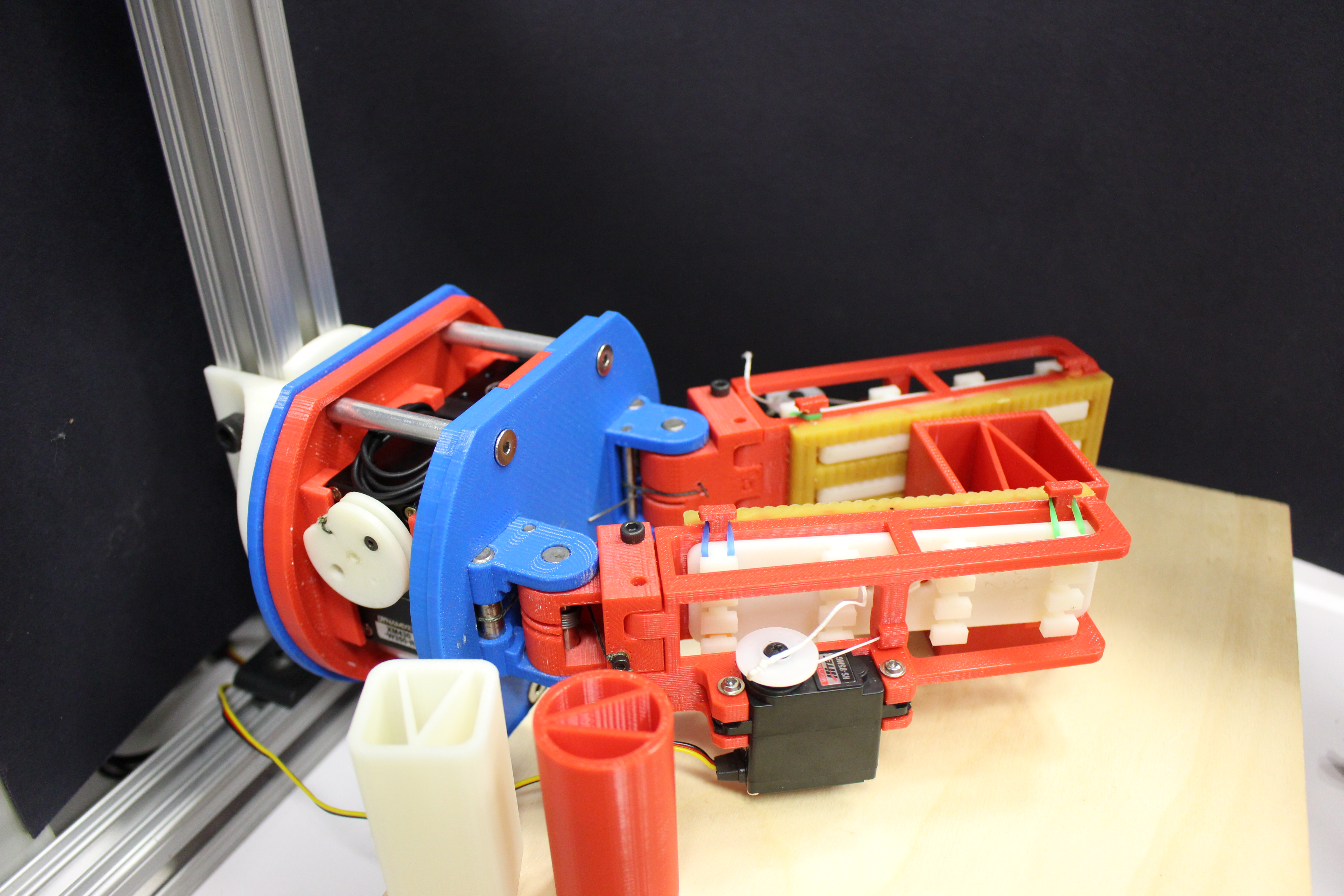
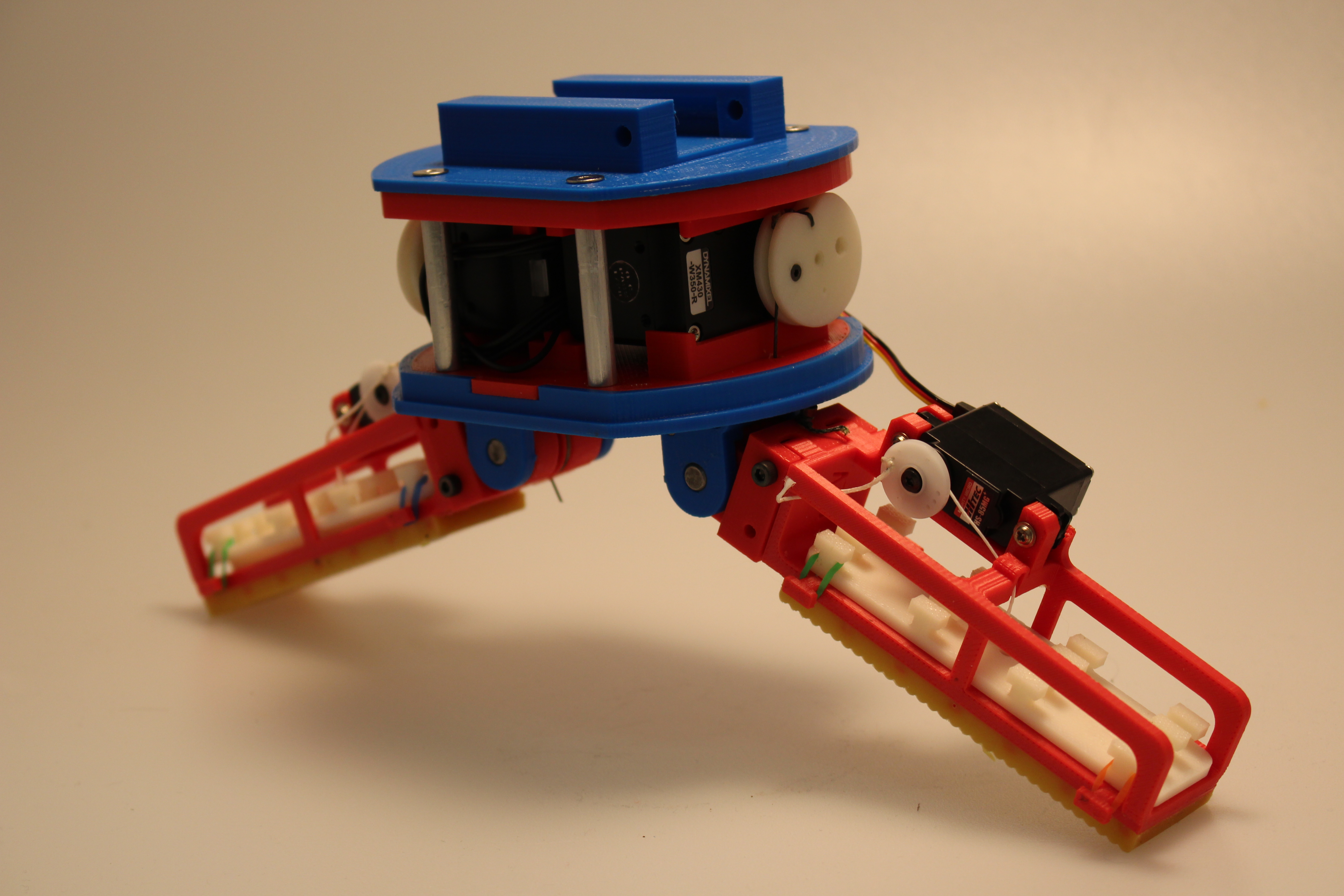
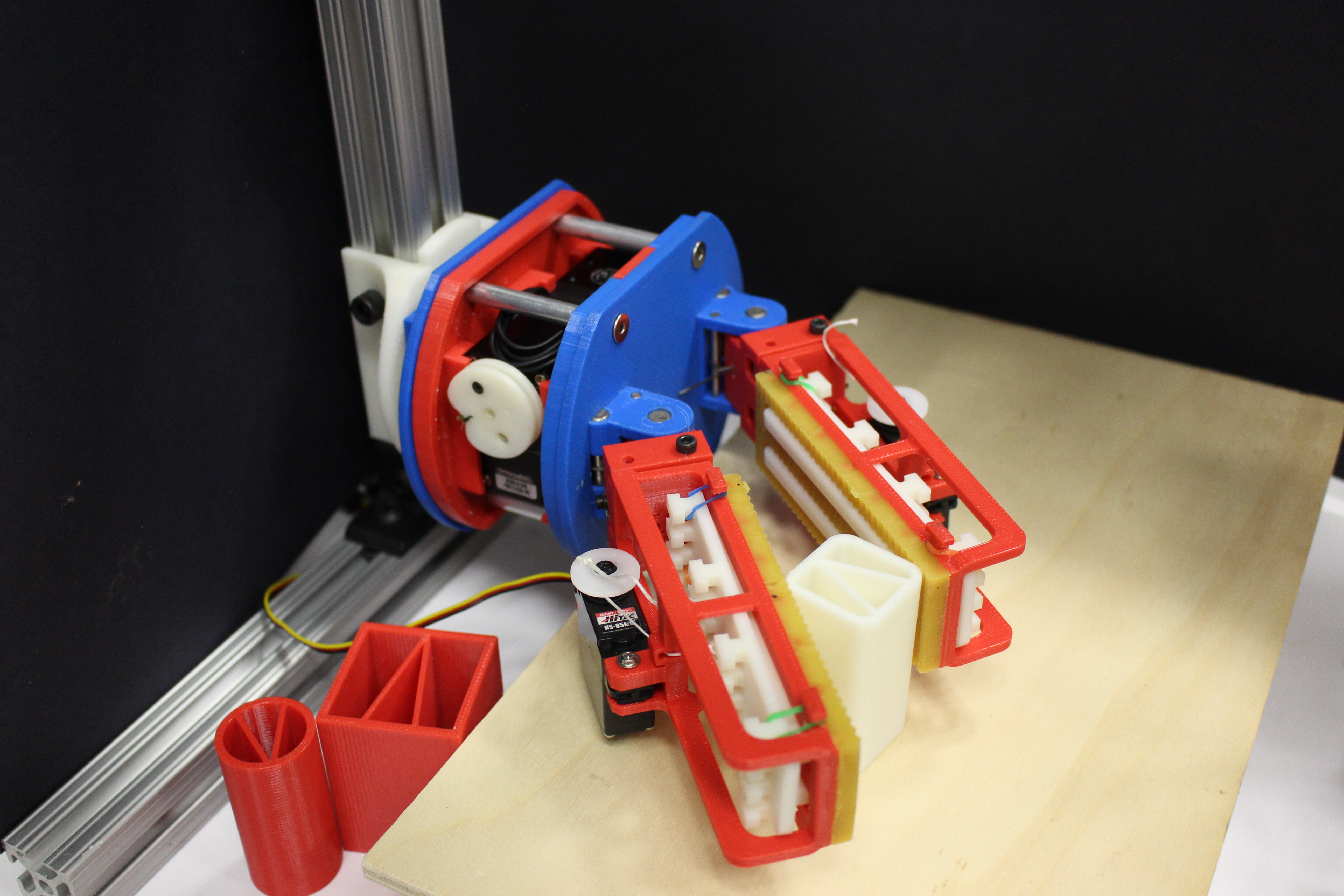
The Model VF (variable friction) is an adapted Model T42 designed for simple and robust planar within-hand manipulation. It is able to both, passively and actively, change surface friction during a manipulation task, enabling it to perform predefined manipulations with ease.