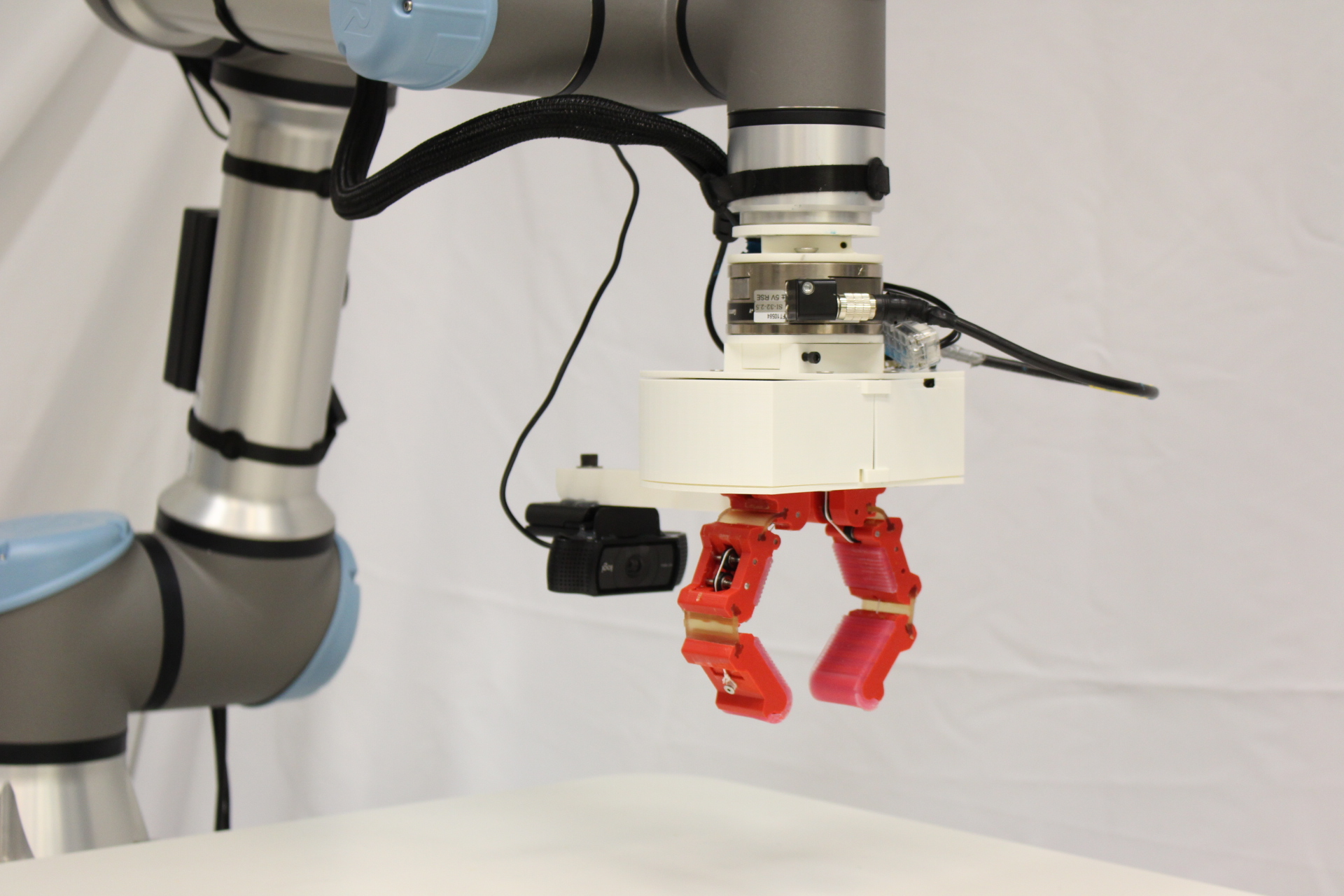
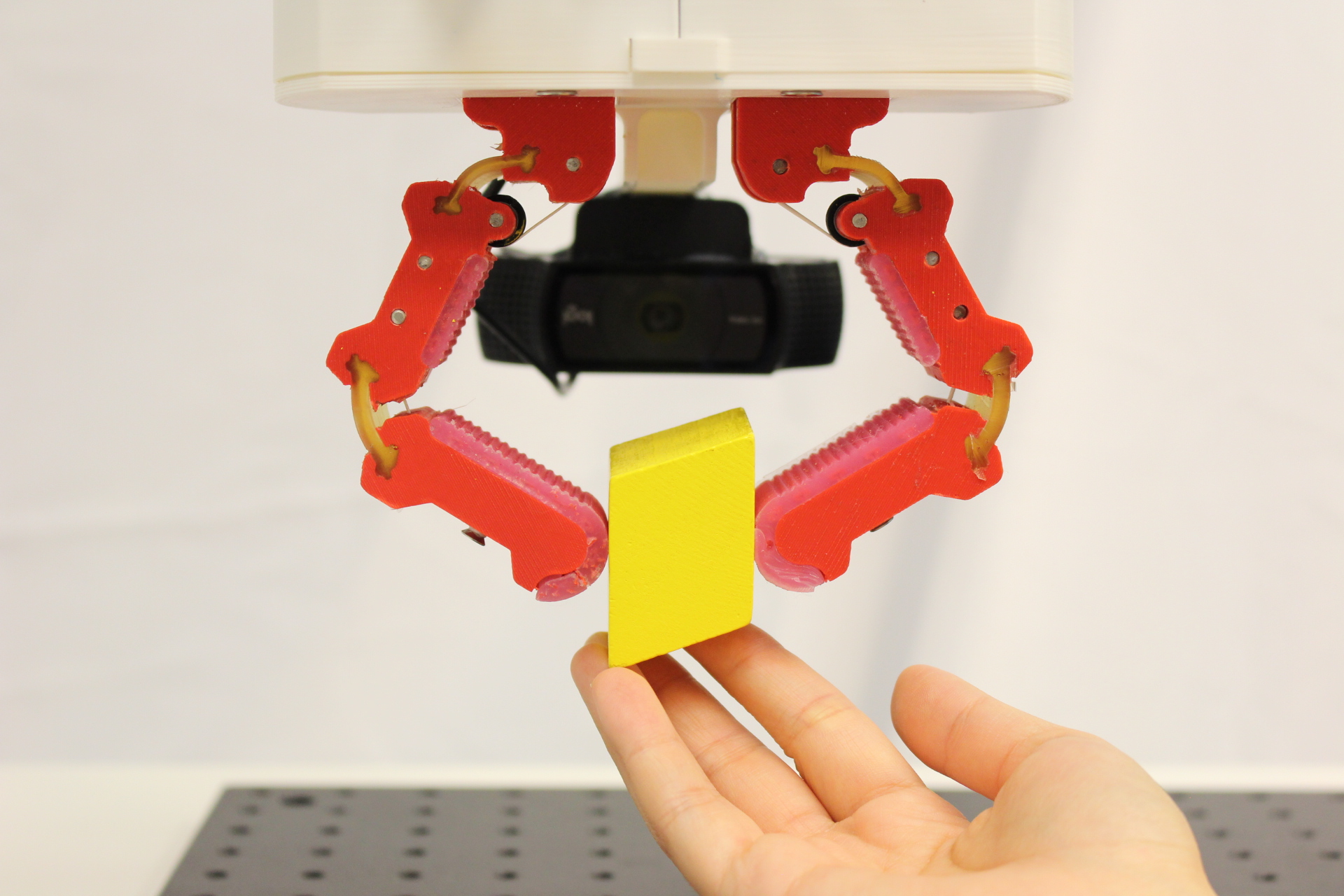
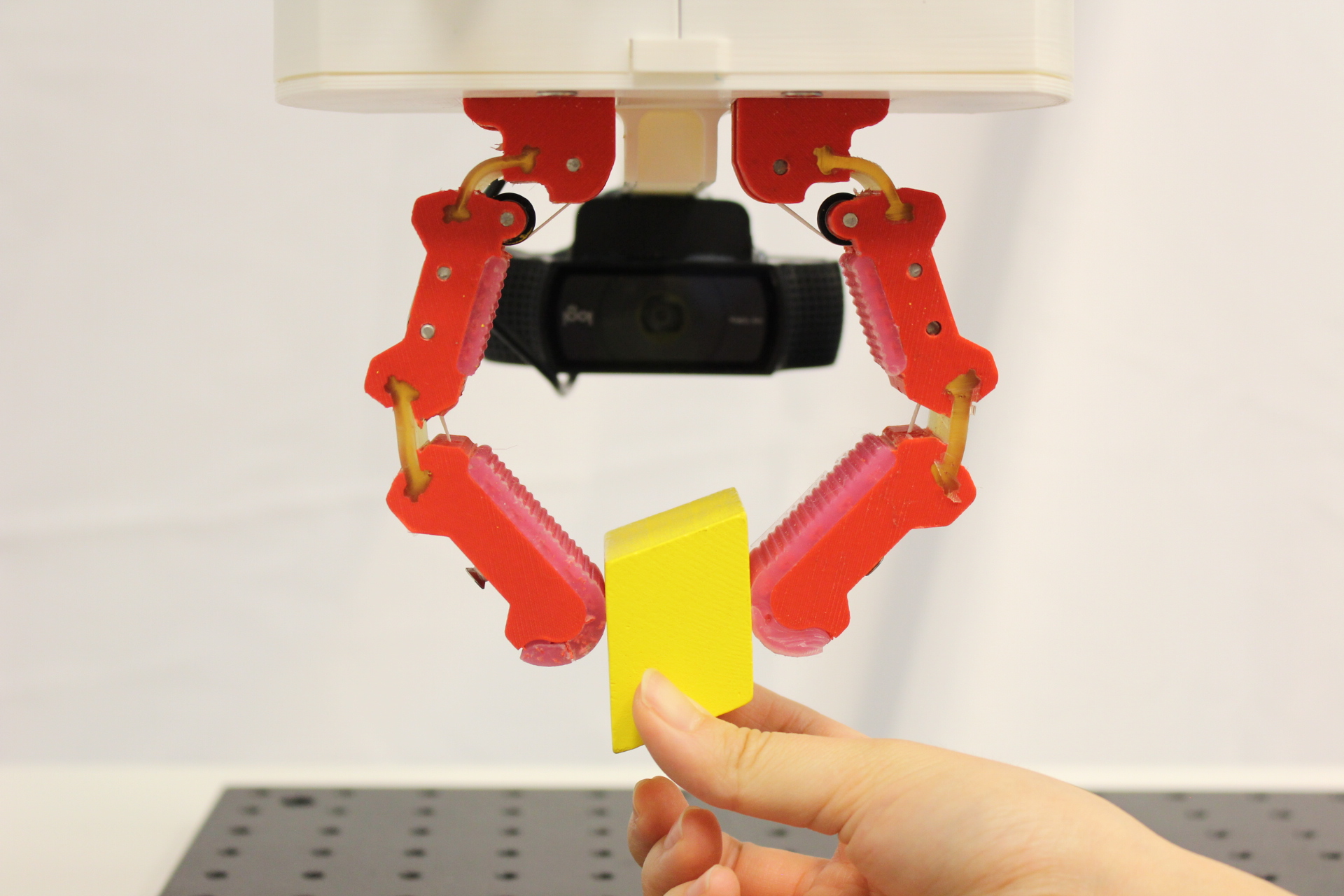
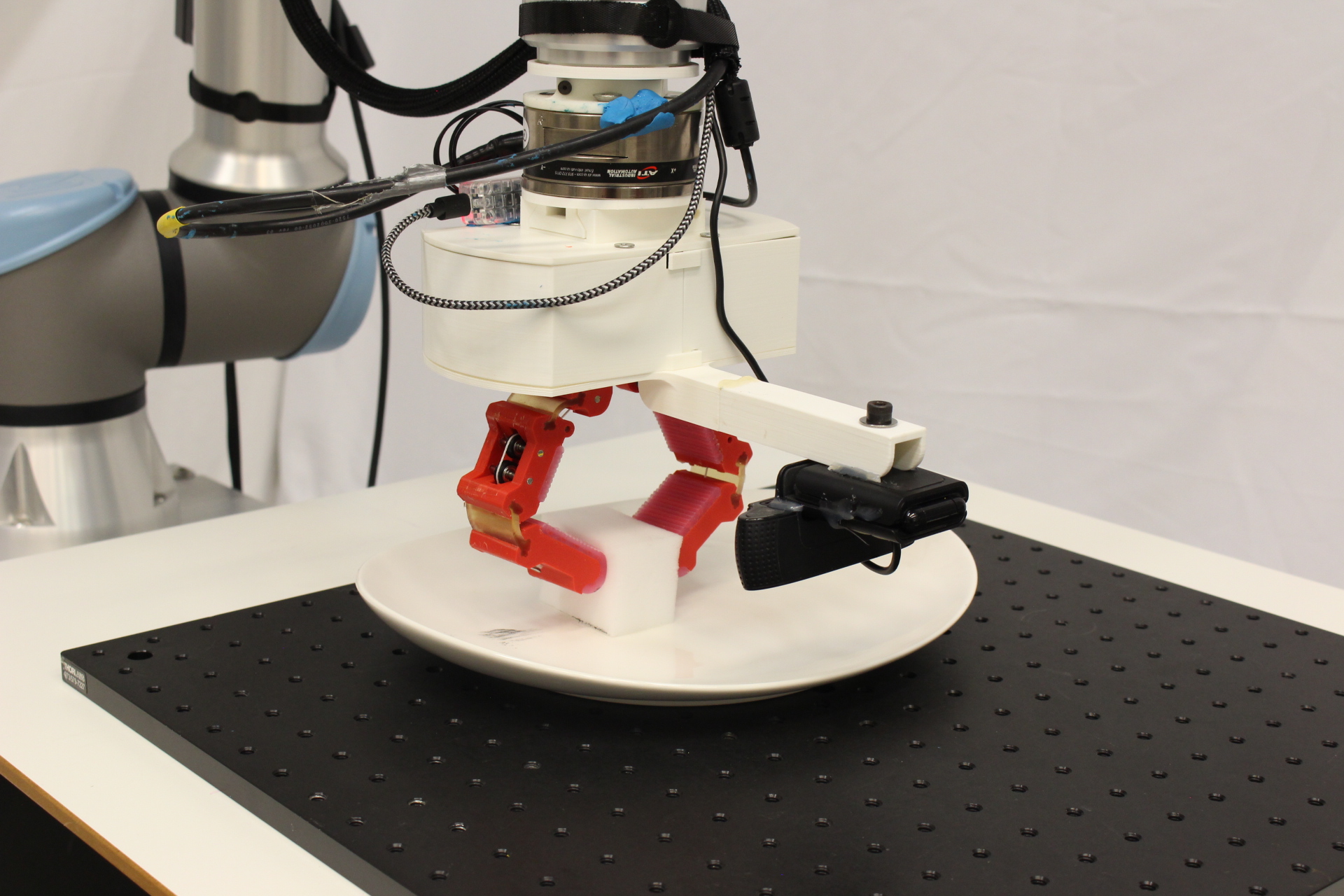
The Model F3 is an adaptation of the flexure-flexure version of Model T42. This hand is designed to enable contact force estimation based on gripper deformation using a wrist-mounted camera. Length and angle of the finger links have been changed to avoid singularities upon contact at the fingertip. Tendon routing and motor positions are optimized to significantly reduce tendon friction which allows for more accurate force predictions.
Used together with our force estimation system, this hand can perform force-controlled wiping, peg-insertion, and calligraphy writing tasks without needing a force torque sensor. Please see the following paper for more details on the visual force estimation system.
[paper under review]