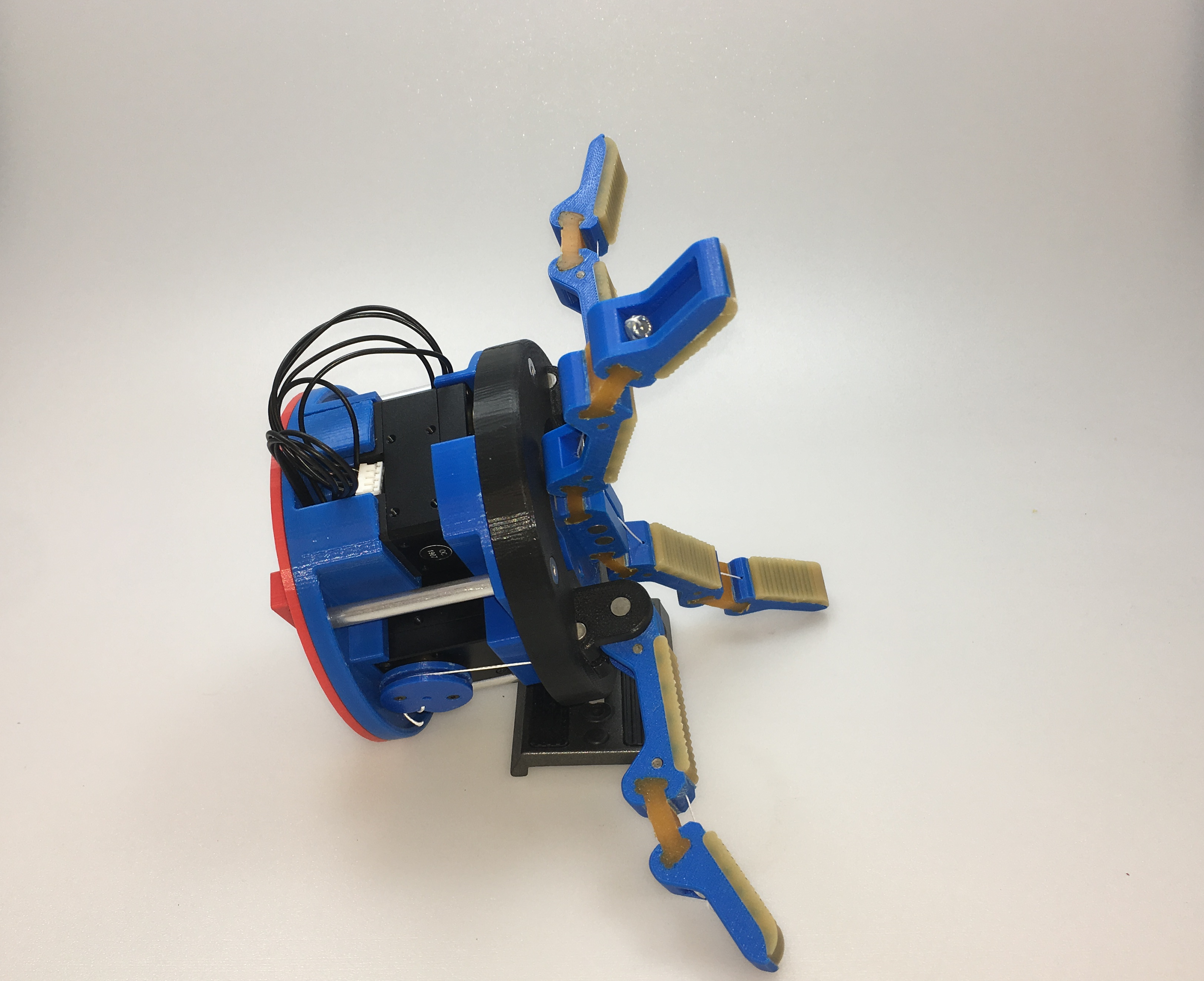
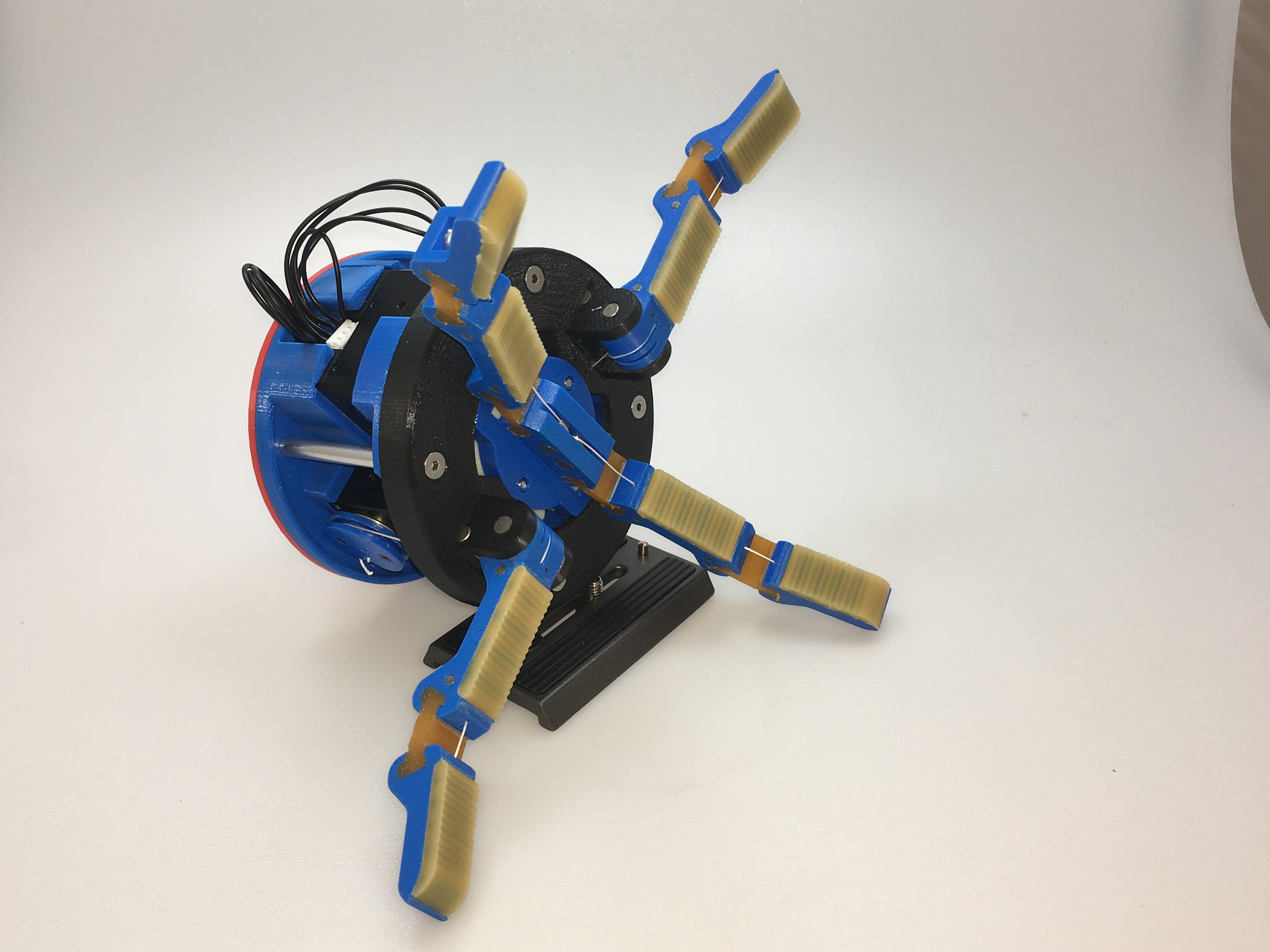
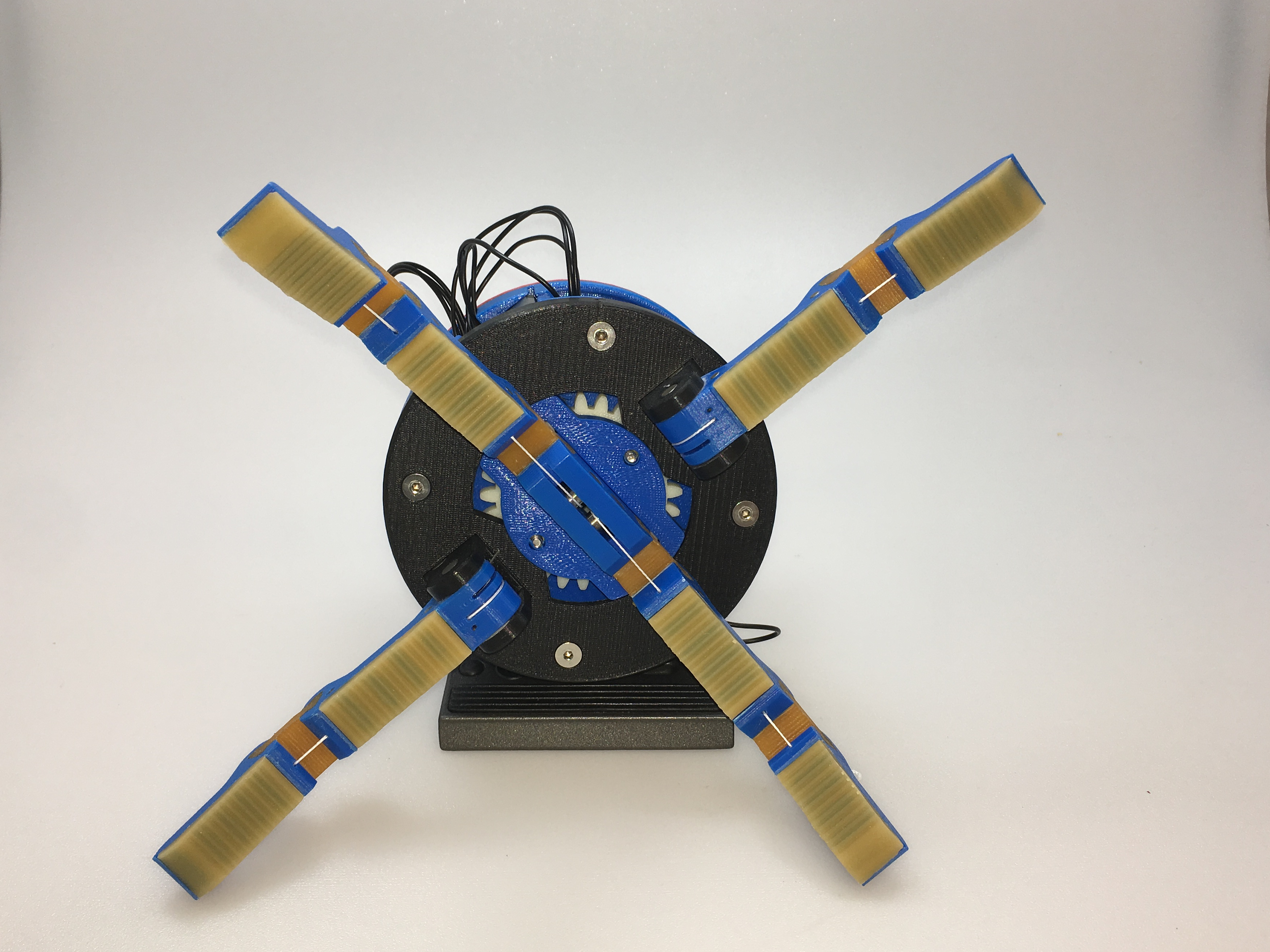
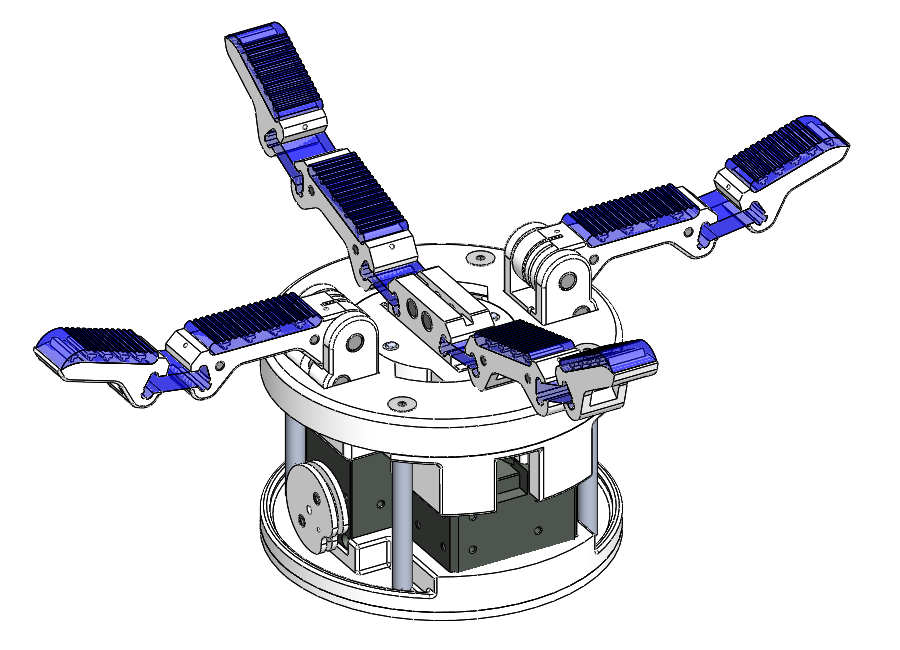
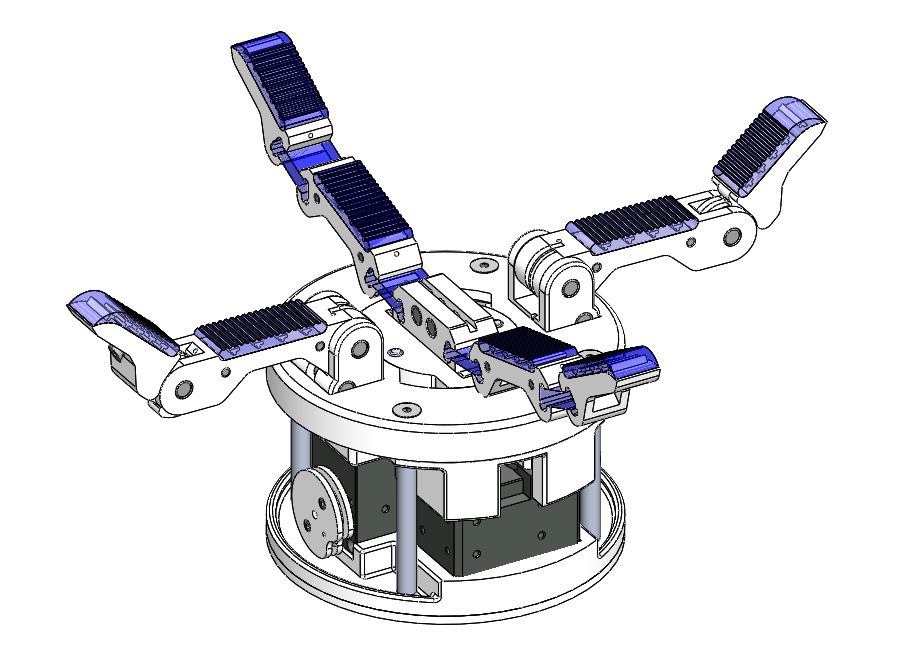
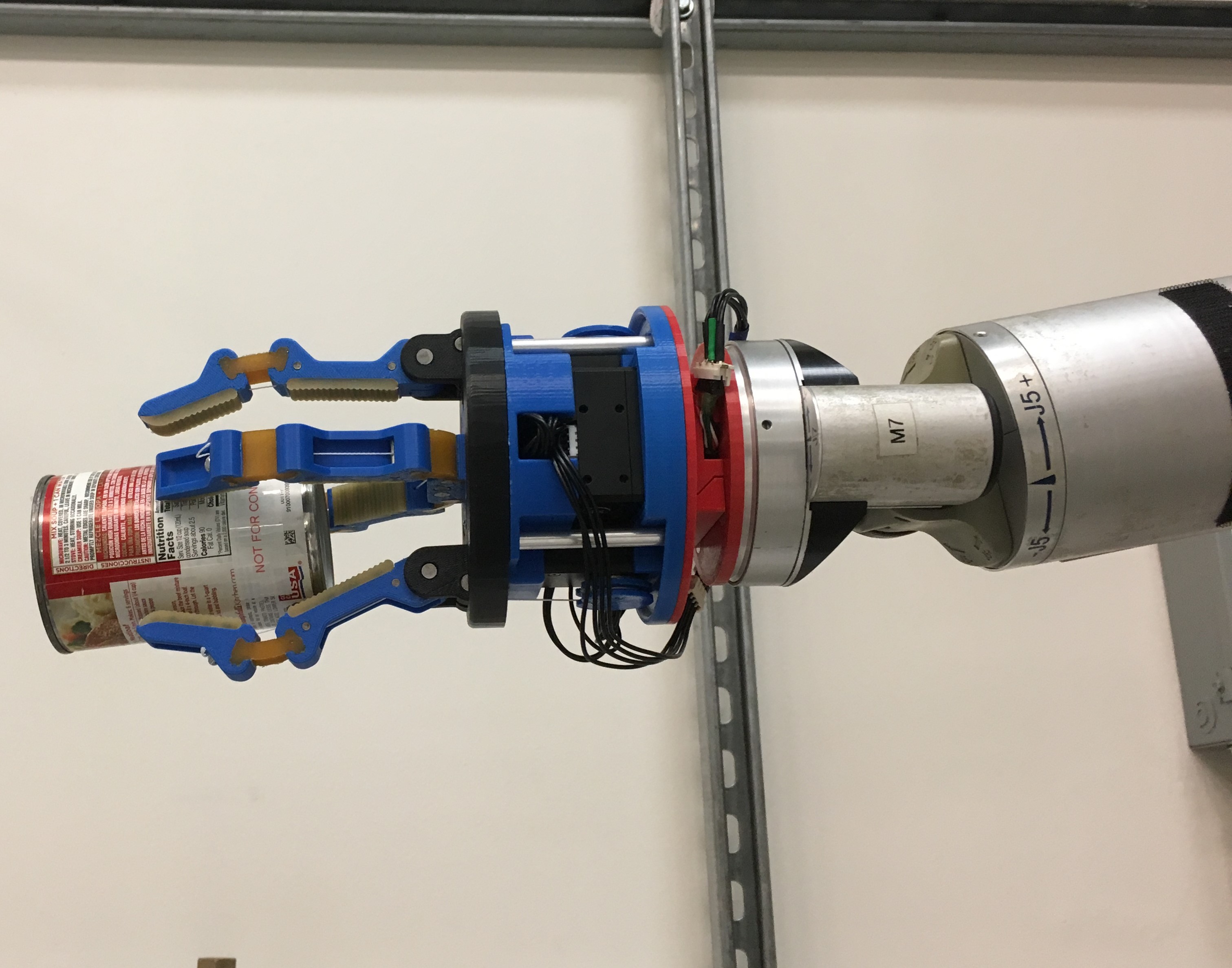
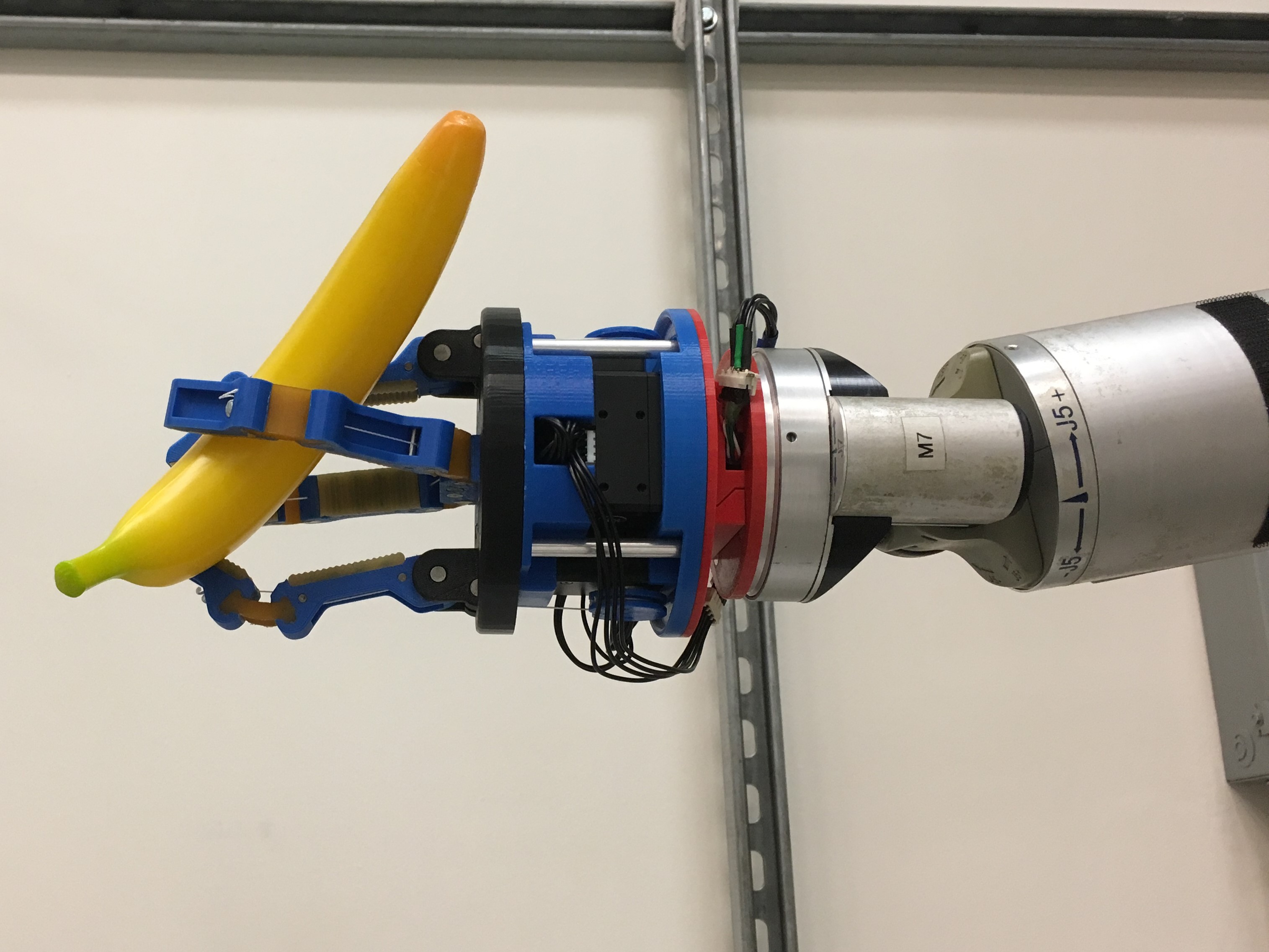
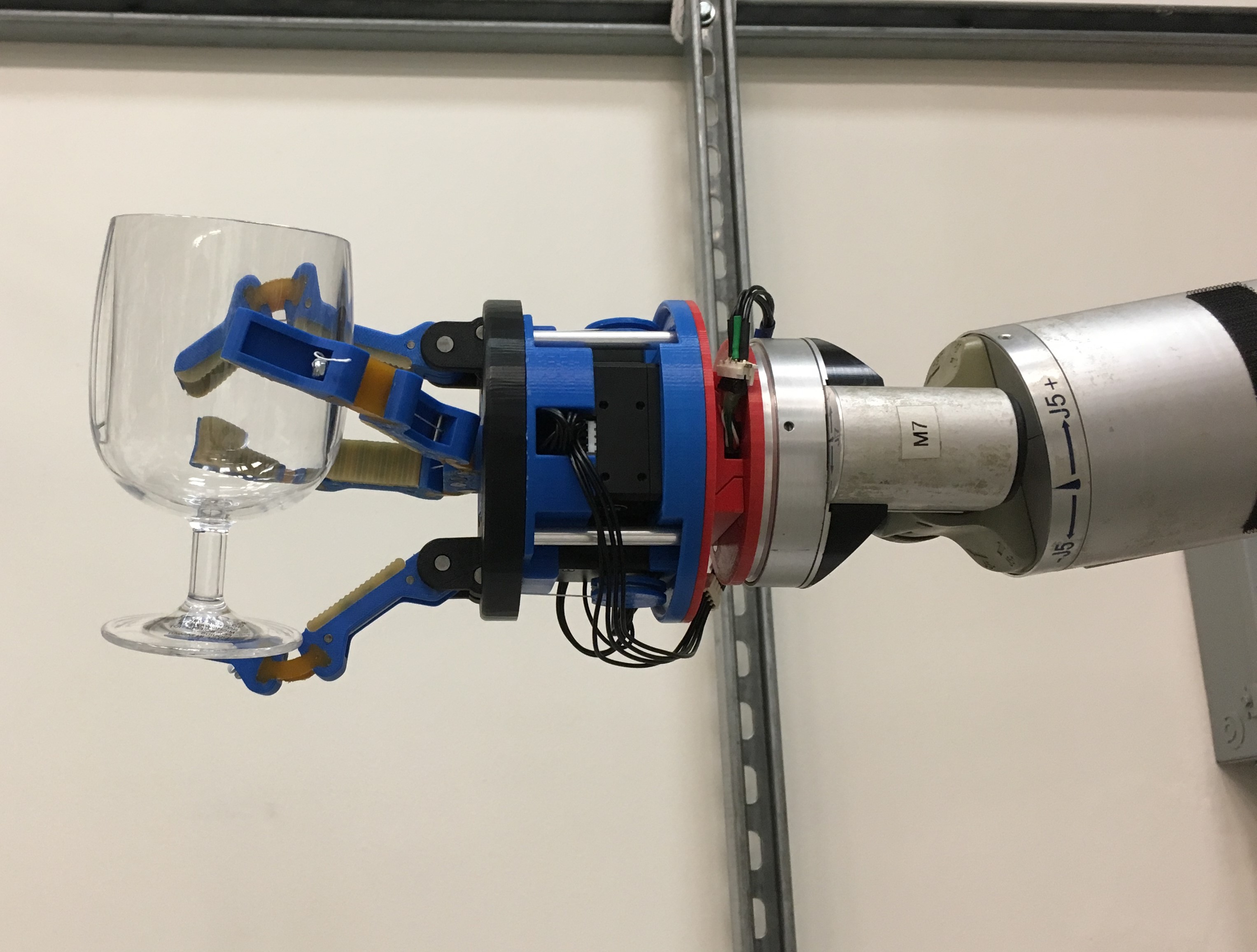
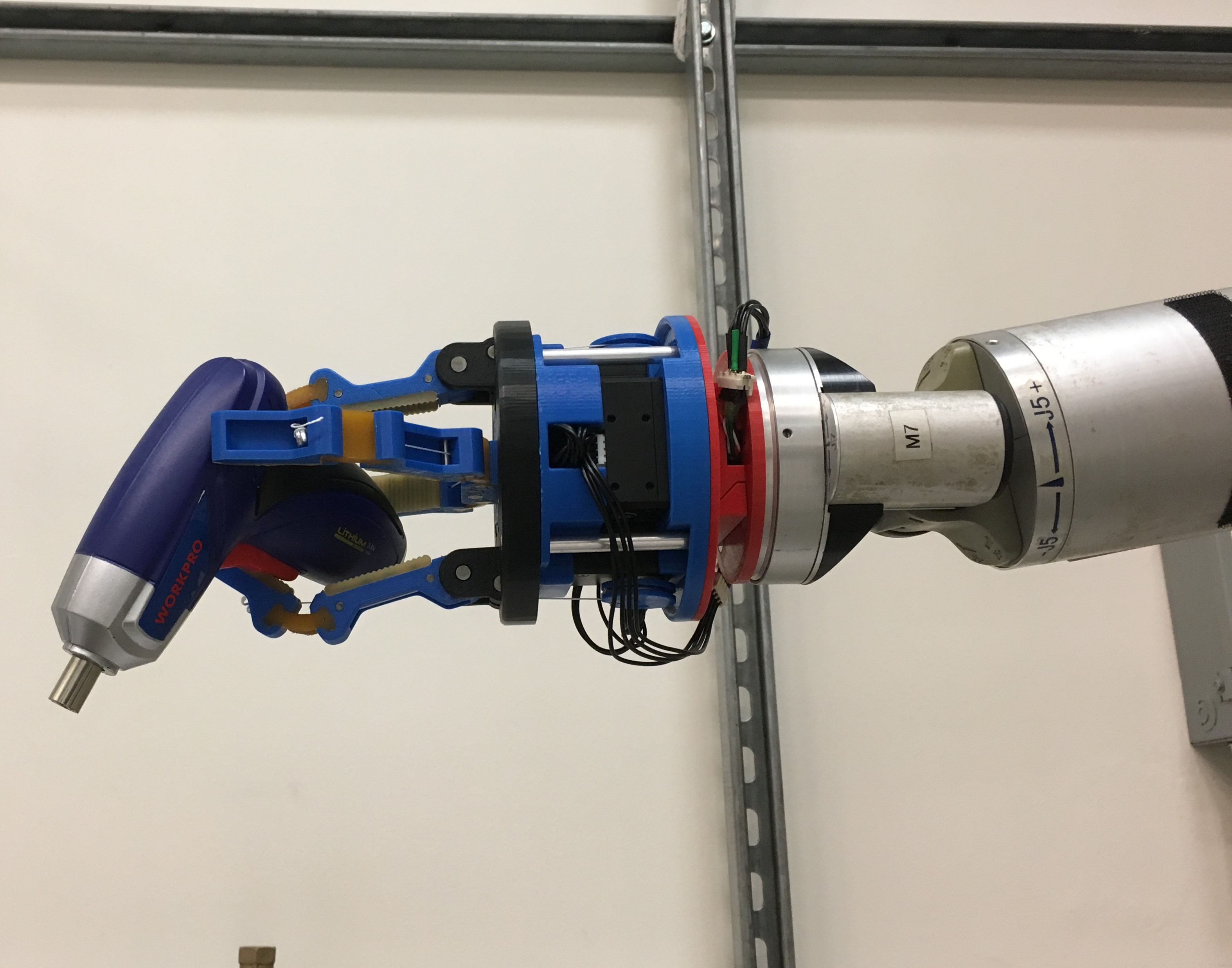
The Model Q includes two independently-driven, precision-grasping fingers, in addition to a set of rotating, power-grasping fingers. This mechanical configuration allows for finger-gaiting while also retaining the passive adaptability and other capabilities of the underactuated finger pairs. As a result, the hand, requiring only four actuators, is capable of a unique set of dexterous manipulation primitives, including finger-gaiting and precision manipulation, while retaining the robust, adaptive precision and power grasping behavior of underactuated hands.