About Model M2
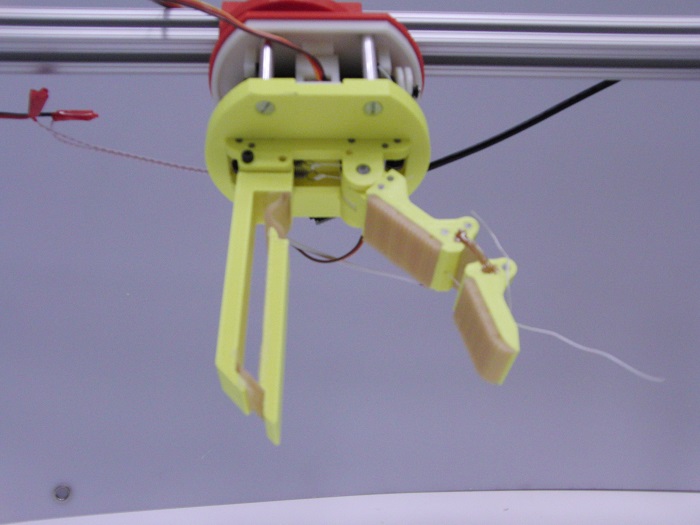
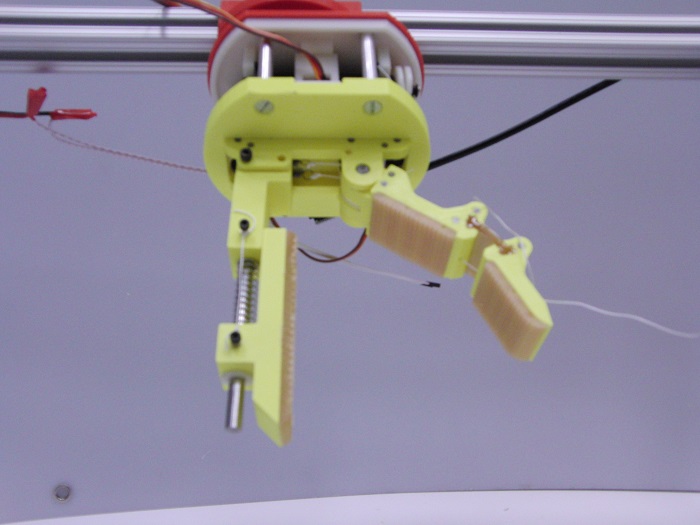
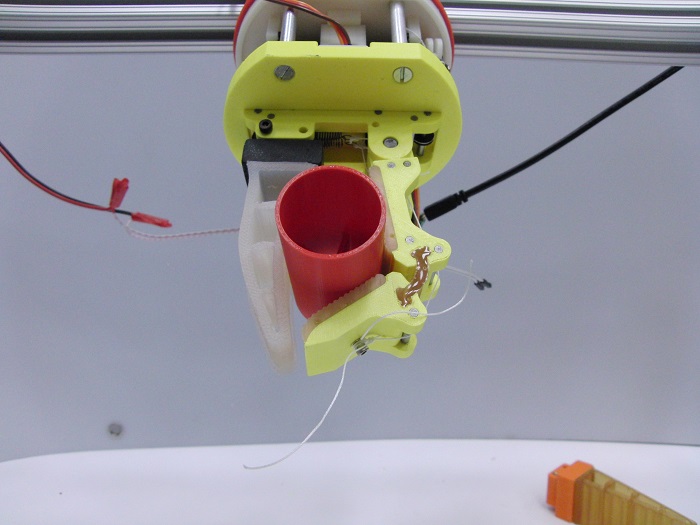
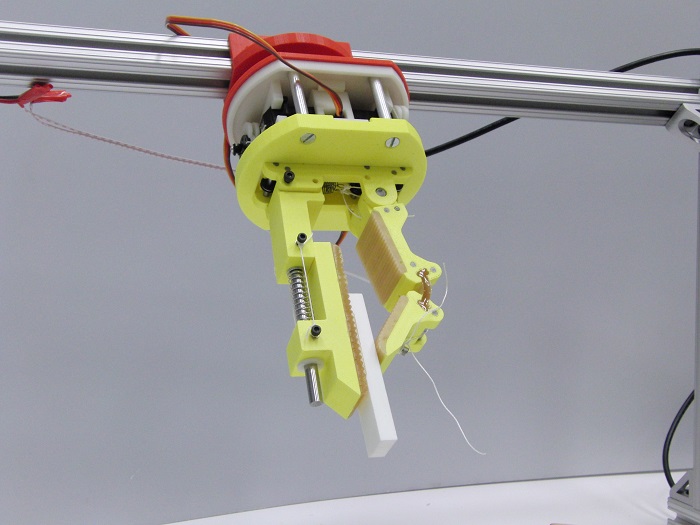
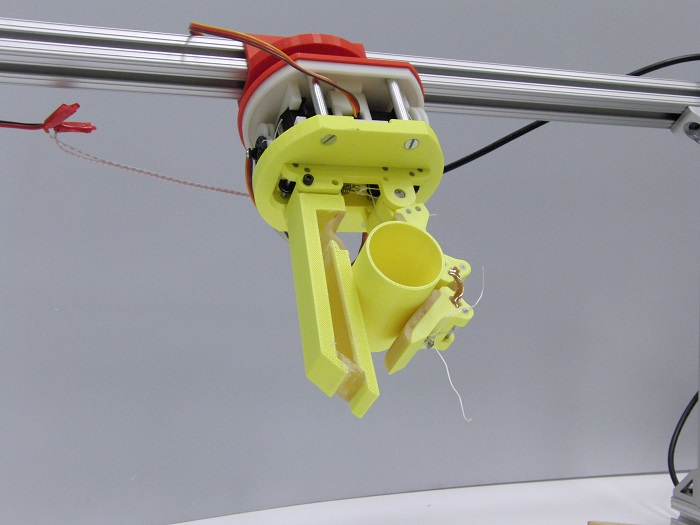
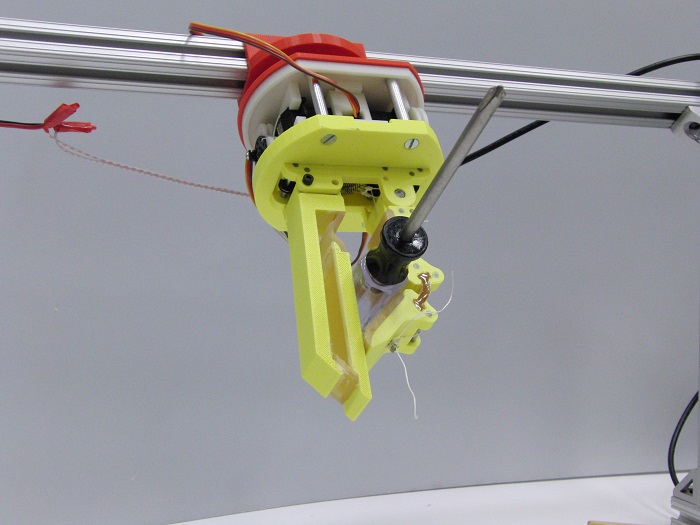
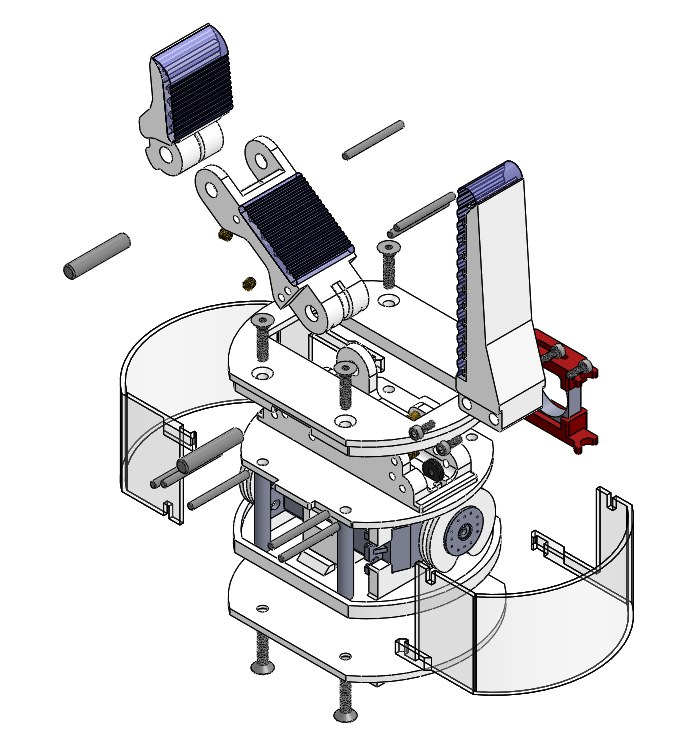
The Multi-Modal (M2) Gripper, consists of a modular thumb with varying degrees of passive compliance and a dexterous, tendon-driven forefinger that can produce either underactuated or fully-actuated behaviors. It seeks to extend the manipulation capabilities of a simple gripper through a novel, underactuated design that produces several distinctive modes of operation.
A simpler, single actuator design iteration exhibiting only underactuated grasping is also available as the Model M(inimalist) Gripper.
R.R. Ma, A. Spiers, and A.M. Dollar
"M2 Gripper: Extending the Dexterity of a Simple, Underactuated Gripper," Proceedings of the 2015 IEEE International Conference on Reconfigurable Mechanisms and Robotics (ReMAR).
A. Spiers, S. Baillie, T. Pipe, and R. Persad, "Experimentally Driven Design of a Palpating Gripper with Minimally Invasive Surgery Considerations," IEEE Haptics Symposium, pp. 261-66, 2012
Design Options
Fingers
Pivot-Flexure
Pivot-Pivot
Actuators
Dynamixel (M2)
Power HD (M2)
Dynamixel (M)
Power HD (M)