Robust Grasping and Manipulation
Research in the GRAB Lab is focused on the following efforts:
(* inactive projects as of 2018)
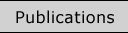
Dexterous Manipulation
Robotic Grasping
Benchmarking
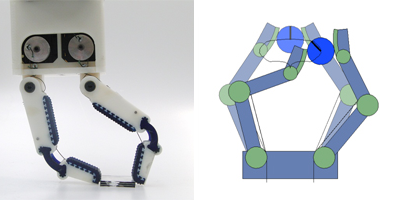
Parallel Manipulators
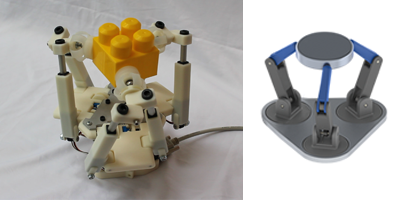
Aerial & Floating Base*
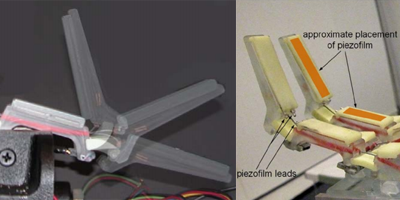
Sensors*
© Copyright 2014.