|
|
Robotic Grasping |
|
|
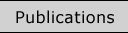
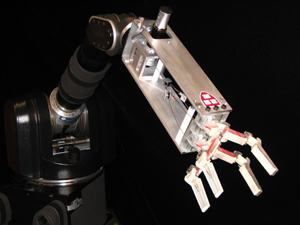
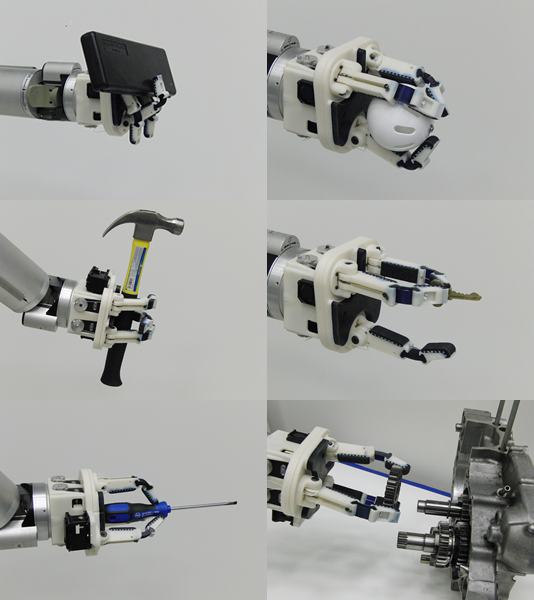
Grasping and manipulating objects in unstructured environments, where object properties are not known a priori and sensing is prone to error, is one of the central challenges in robotics. The uncertainty in the relationship between the object and gripper makes it difficult to control contact forces and establish a successful grasp. One approach to dealing with this uncertainty is through compliance, so that positioning errors do not result in large forces and the grasper conforms to the object. Compliance has most often been implemented through control of manipulator impedance, based on active use of joint sensors for position, velocity and force/torque. However, carefully designed mechanical compliance in the finger structure can allow the gripper to passively conform to a wide range of objects while minimizing contact forces. Compliance conveys two key advantages for robotic grasping: adaptability and robustness. We take advantage of the adaptability inherent with compliance and enhance it by incorporating further adaptability in the form of underactuation, and investigate its application to grasping.
Sample Publication:
Aaron M. Dollar and Robert D. Howe
Simple, Robust Autonomous Grasping in Unstructured Environments, proceedings of the 2007 IEEE International Conference on Robotics and Automation (ICRA), Rome, Italy, April 10-14, 2007.
RoboticGrasping
2007
All Robotic Grasping Publications >>
|