|
|
Parallel Manipulators |
|
|
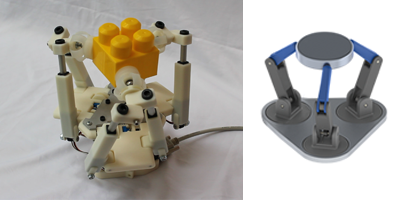
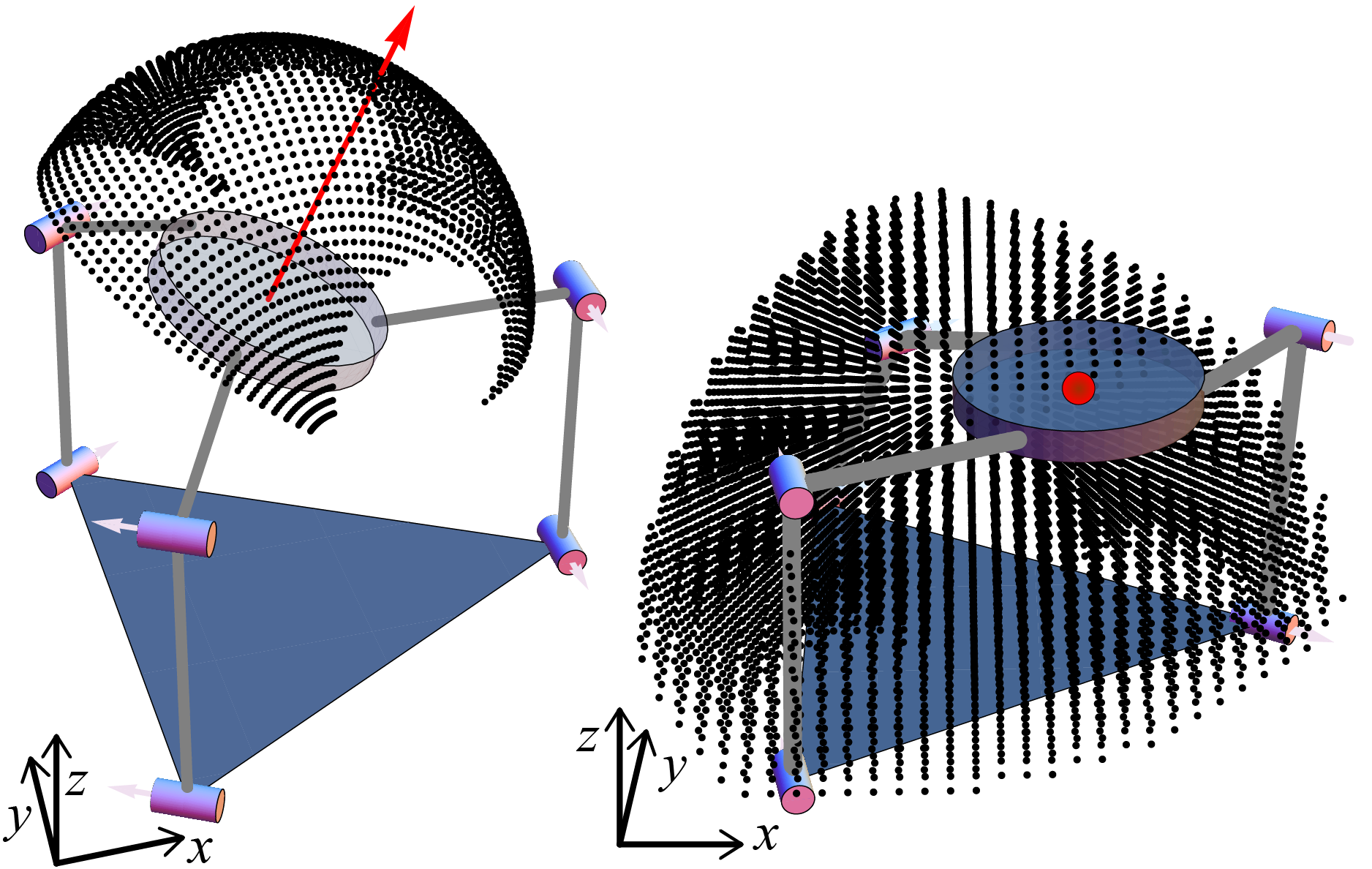
While grasping is a crucial first step in the majority of object manipulation tasks, manipulating the object after grasping in order to further refine its position/orientation is typically also required. Most research on within-hand manipulation has focused on anthropomorphic architectures that attempt to mimic the form and manipulation capabilities of the human hand by employing a set of multi-phalanx fingers and an opposable thumb. Some proposed designs even attempt to mimic the tendon routing seen in nature. While the logic behind building anthropomorphic dexterous hands is evident, this strategy may not be optimal for many robotic tasks. Human hands have evolved to cope with a variety of challenges found in nature not relevant to robotic systems, leading to unnecessary complexity in actuation and sensing for many industrial applications. In contrast, in the field of parallel robotics, many nonanthropomorphic parallel manipulator designs have been shown to produce highly dexterous motion with minimal actuation/sensing complexity. Our work investigates the use of parallel manipulators as robotic hands, through design, experimentation, and theoretical study.
Sample Publication:
Julia Borras-Sol and Aaron M. Dollar
Analyzing Dexterous Hands using a Parallel Robots Framework, Autonomous Robots, Special Issue on Modern Approaches for Dexterous Manipulation, Vol. 26 (1-2), pp. 169-180, 2014.
Parallel Mechanisms
Dexterous Manipulation
UnderactuatedMechanisms
2014
All Parallel Manipulators Publications >>
|