|
|
Mobile Robots |
|
|
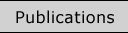
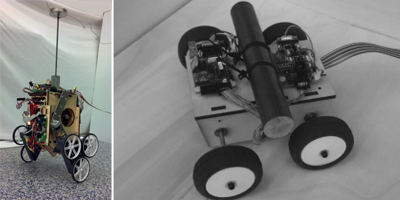
The inverted pendulum has widely established itself in technical literature as a platform for demonstration of control theory and practice. A relatively recent offshoot of the classical inverted pendulum is the wheeled inverted pendulum (WIP), popularized in contemporary culture by the Segway Personal Transporter. There have been other WIPs of varying architectures that have been successfully designed and constructed. In our work, we address the question of WIP design. Specifically, we investigate how design choices influence WIP performance
Sample Publication:
Hari Vasudevan, Aaron M. Dollar, and John B. Morrell
Design for Control of Wheeled Inverted Pendulum Platforms, ASME Journal of Mechanisms and Robotics, vol. 7(4), 041005, 2015.
MobileRobots
2015
All Mobile Robots Publications >>
|