|
|
Human Safe Mechanisms |
|
|
As the role of robotics continues to expand beyond highly structured manufacturing applications to other domains, including medical and service applications, safe operation in the presence of people is becoming increasingly important. Many existing safety systems rely on fragile and sophisticated joint torque sensors and control models that greatly add to the expense and complexity of the robot system. Controls researchers and robot manufactures have implemented "active" safety systems usually involving sensing the applied force/torque and varying applied motor currents. While these solutions can result in high-performing and functional robots, they still suffer from delayed response, increased cost and control complexity, and decreased system reliability due to the the potential for sensor failure. In our work, we investigate purely mechanical means of increasing the safety of robots and mechanisms, to enable more safe and widespread use in close proximity to humans.
Sample Publication:
Jillian Cochran, Jimin Hong, and Aaron M. Dollar
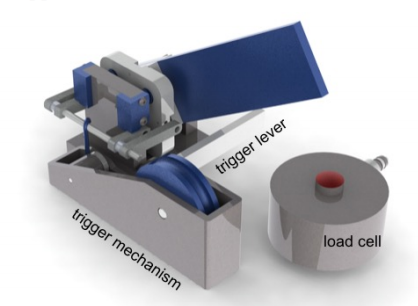
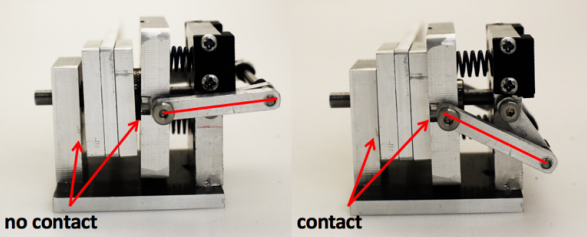
Fusion Clutch: A Bi-Stable Latching Mechanism for Human-Safe Robots, proceedings of the 2017 ASME IDETC
Mechanisms and Robotics Conference, 2017.
Human-Safe Robots
2017
All Human-Safe Mechanisms Publications >>
|