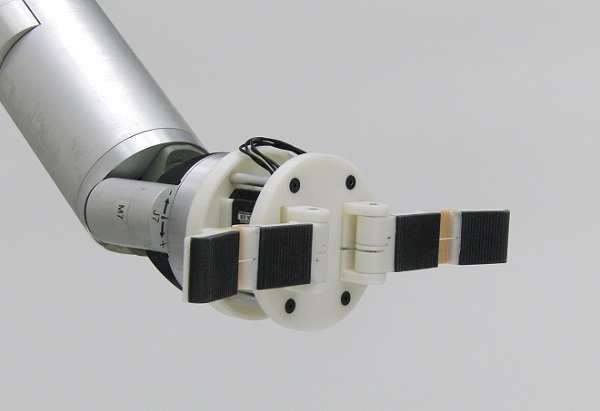
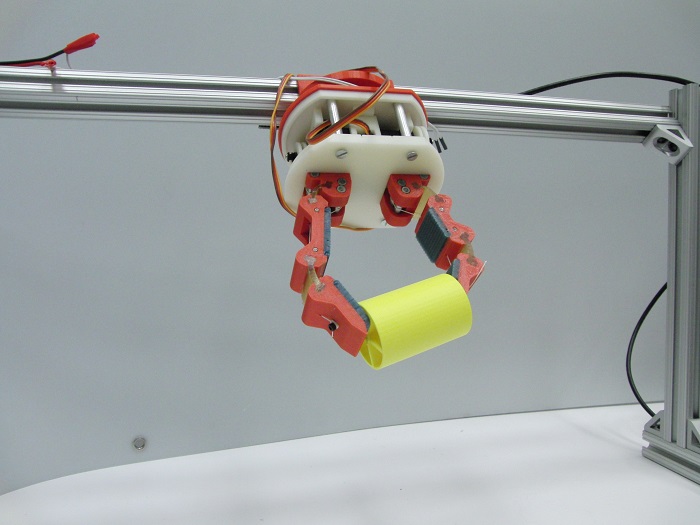
About Model T42
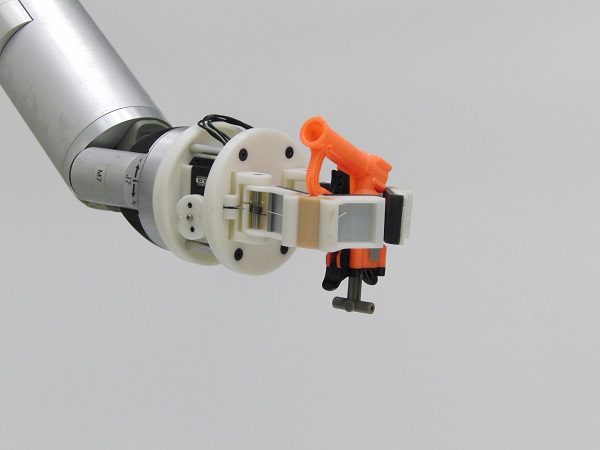
The Model T42 is a more dexterous alternative to the Model T. It consists of two underactuated fingers, each driven by an independent actuator. This design emerged from initial efforts to explore dexterity and in-hand manipulation primitives with underactuated hands.
L.U. Odhner, R.R. Ma, and A.M. Dollar
"Open-Loop Precision Grasping with Underactuated Hands Inspired by a Human Manipulation Strategy," IEEE Transactions on Automation Science and Engineering, vol. 10(3), pp. 625-633, 2013.
L.U. Odhner, R.R. Ma, and A.M. Dollar
"Exploring Dexterous Manipulation Workspaces with the iHY Hand", Journal of the Robotics Society of Japan, vol. 32(4), pp. 318-322, 2014
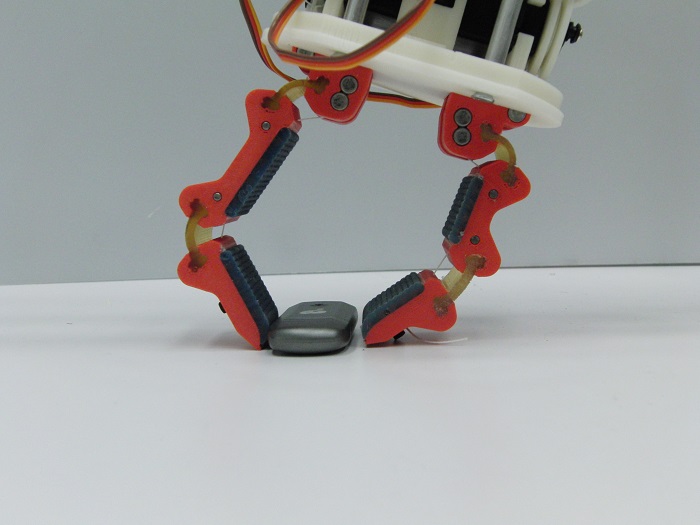
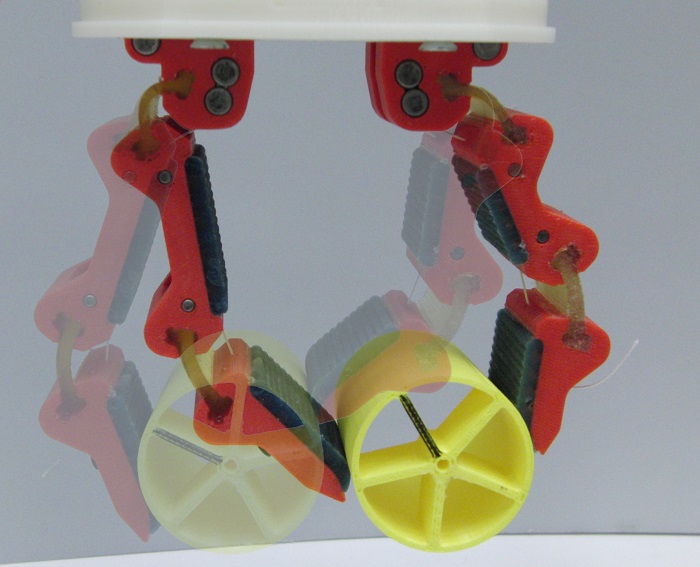
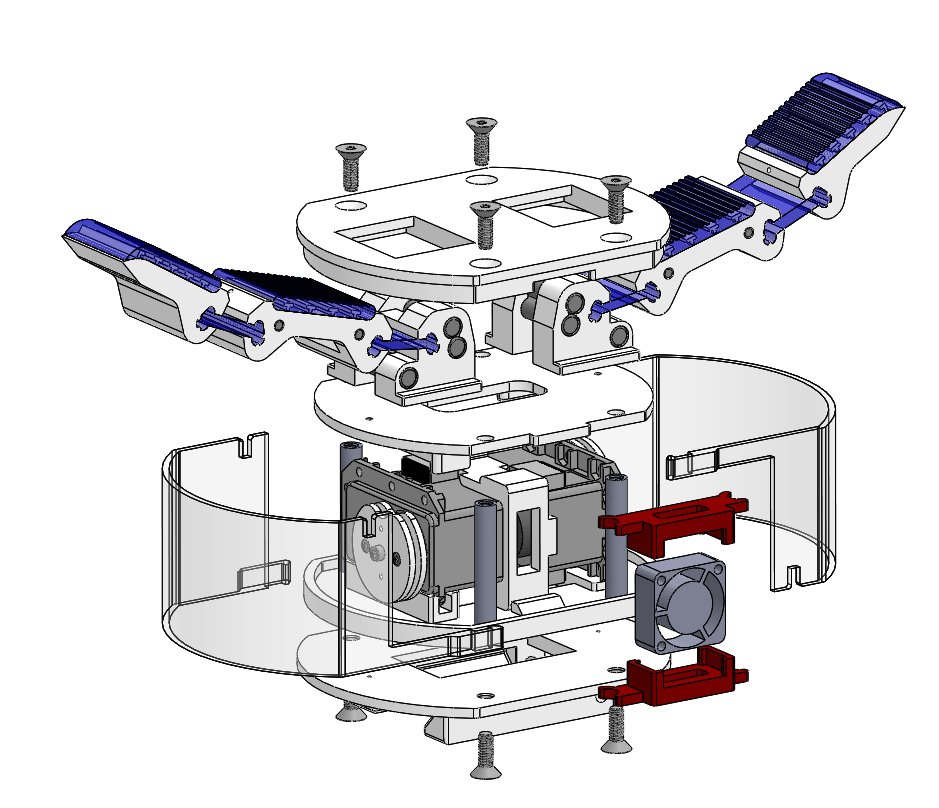
Design Options
Fingers
Flexure-Flexure
Pivot-Flexure
Pivot-Pivot
Actuators
Dynamixel
Power HD