

The Yale OpenHand Project is an initiative to advance the design and use of robotic hands designed and built through rapid-prototyping techniques in order to encourage more variation and innovation in mechanical hardware.
Commercially available robotic hands are often expensive, customized for specific platforms, and difficult to modify. It is typically impractical to experiment with alternate end effector designs. This results in researchers needing to compensate in software for intrinsic and pervasive mechanical disadvantages, rather than allowing software and hardware research in manipulation to co-evolve.
This project intends to establish a series of open-source hand designs, and through the contributions of the open-source user community, result in a large number of useful design modifications and variations available to researchers.


While advances in rapid-prototyping have made it increasingly tractable to make custom parts expediently and on-demand, design choices must be made to make robotic hands suitable for repeated functional use, not just design prototyping. Hands developed through this project are designed to be minimalistic and rugged, especially appropriate for iterative design and operation in unstructured environments.
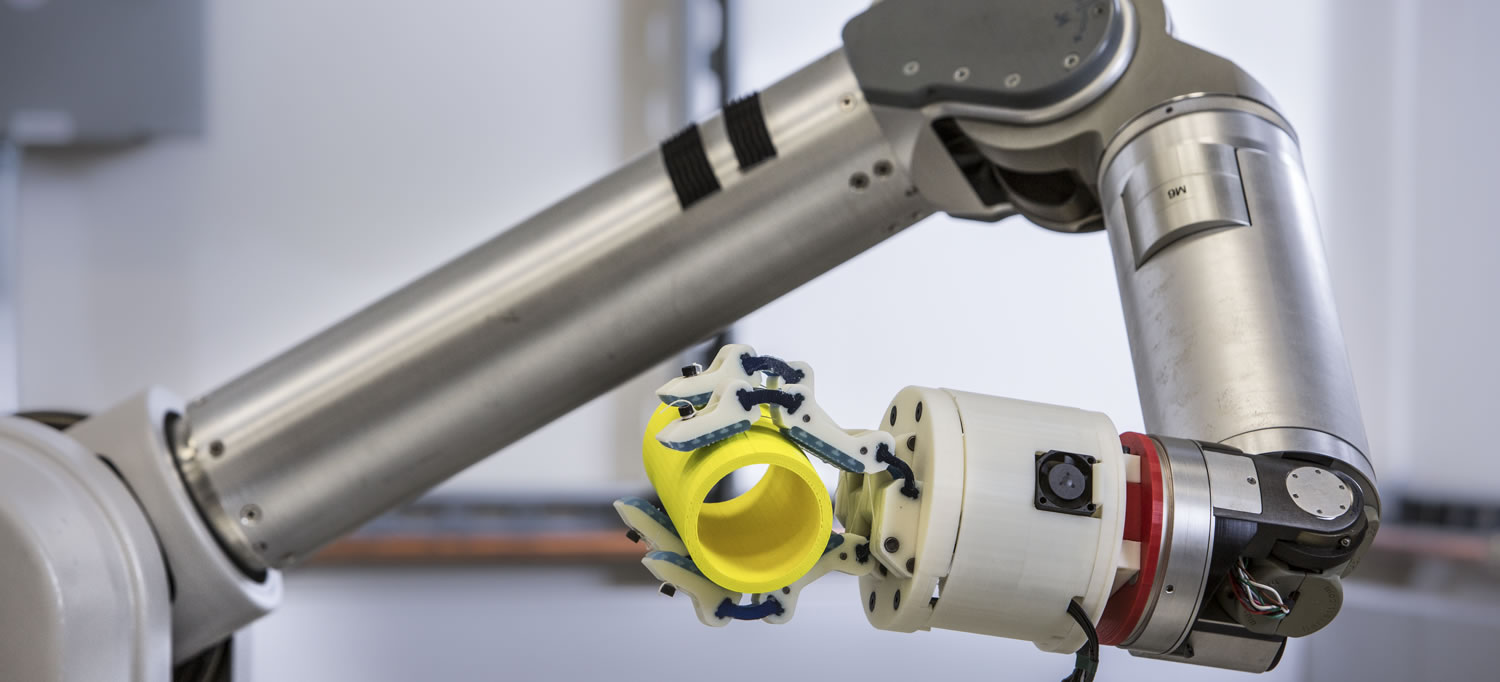
The released hand designs feature tendon-driven underactuated fingers. Underactuated hands have been shown to improve the generality of simple grippers by adaptively conforming to the surface of objects without the explicit need for sensors or complicated feedback systems. This design paradigm separates the actuation and finger elements, enabling a greater degree of customization.
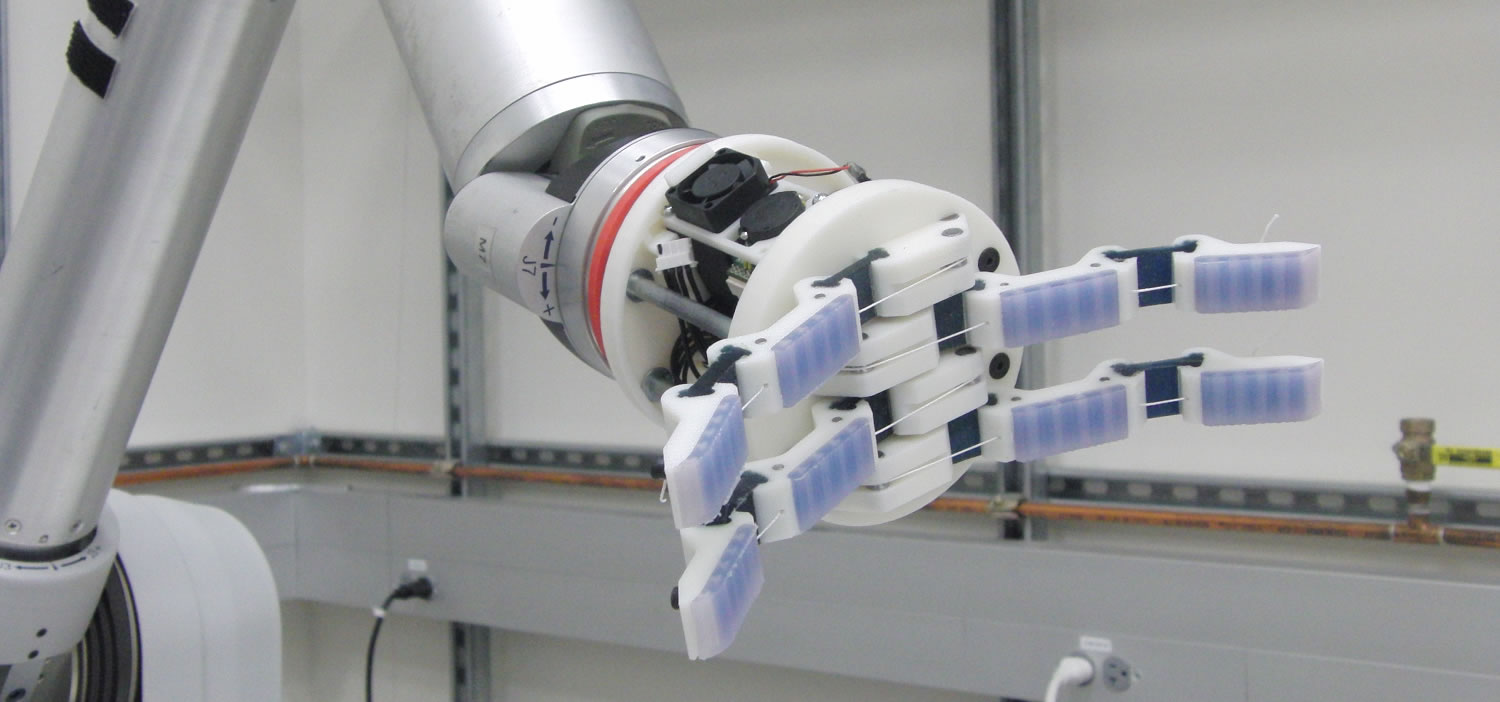
The fingers are fabricated via a process called Hybrid Deposition Manufacturing, which combines resin casting and 3D-printing to create multi-material, monolithic structures. Casting flexure joints and fingerpads increases robustness and minimizes the required number of fasteners.
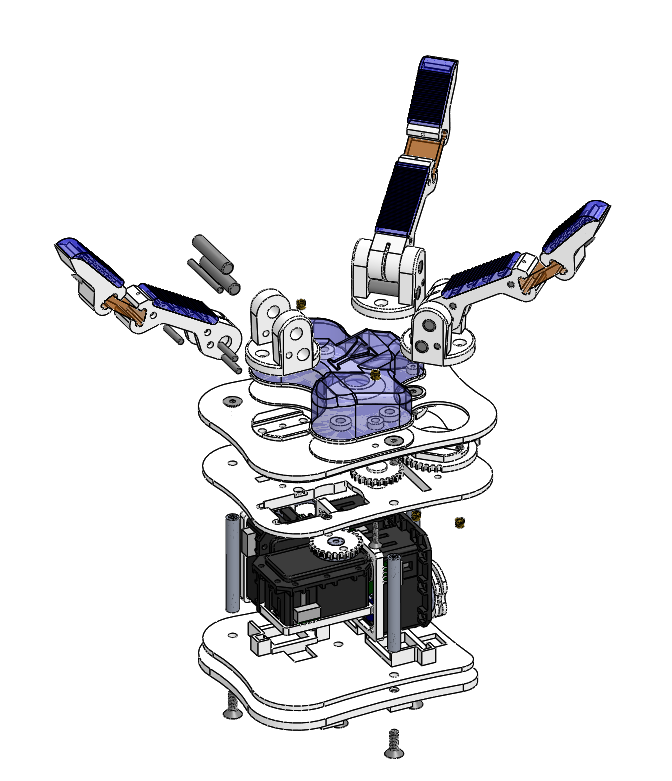
The source CAD files allow for variable configurations, allowing users to quickly change functional parameters (ie. link lengths, transmission ratios) and manufacturing parameters (ie. shell thicknesses, hole dimensions) and have those changes propagate across all relevant parts.

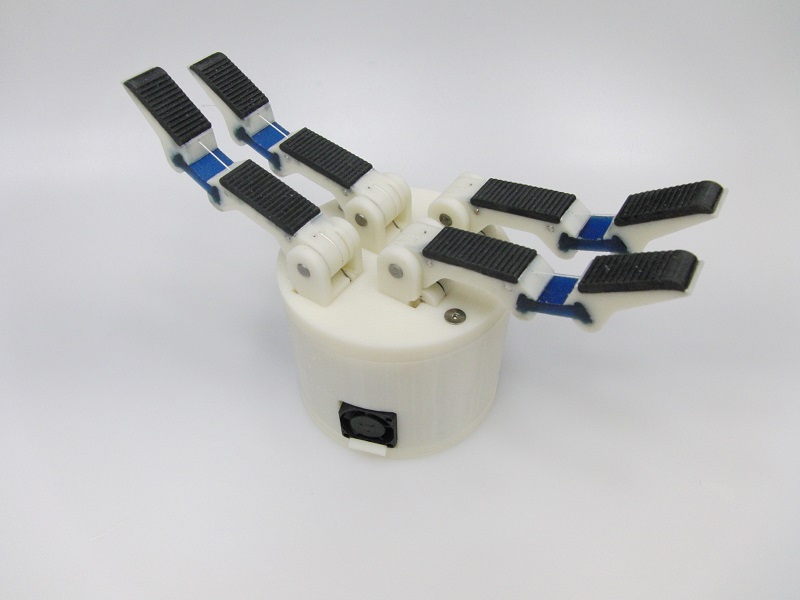
The Model Q distinguishes itself from previous hands with its finger-gaiting capability, enabled by two independently-actuated precision-grasping fingers and one set of rotating power-grasping fingers. The hand, requiring only four actuators, is capable of a unique set of dexterous manipulation primitives, including finger-gaiting and precision manipulation, while retaining the robust, adaptive precision and power grasping behavior of underactuated hands.
The Model VF (variable friction) is an adapted Model T42 designed for simple and robust planar within-hand manipulation. It is able to both, passively and actively, change surface friction during a manipulation task, enabling it to perform predefined manipulations with ease.
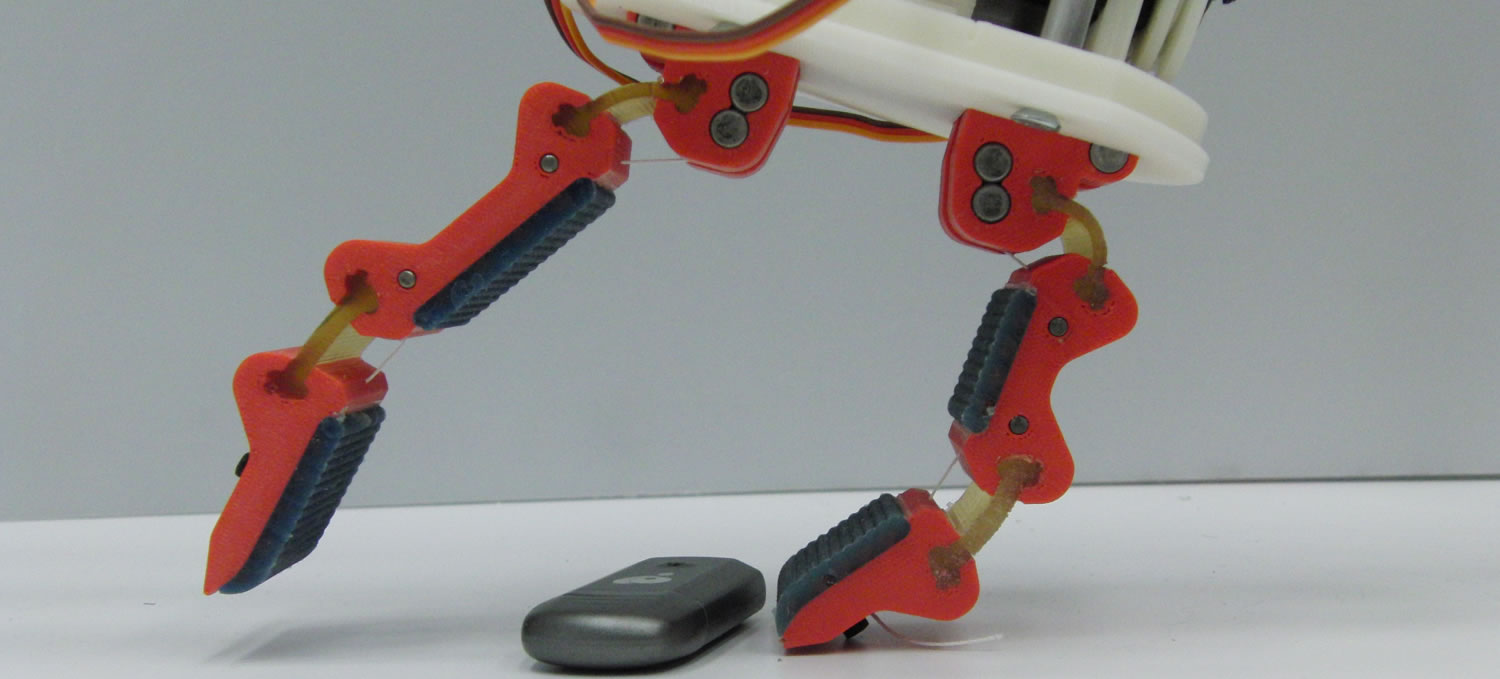
The Model W is a dexterous hand designed for planar within-hand manipulation. Its design is the result of an extensive design space optimization of all planar fingers comprised of up to three serial revolute and prismatic actuators. It is the first OpenHand model to use inexpensive Dynamixel XL-320 servos. Assembly and build guides in preparation, bur first revision CAD files can be found here [.zip].
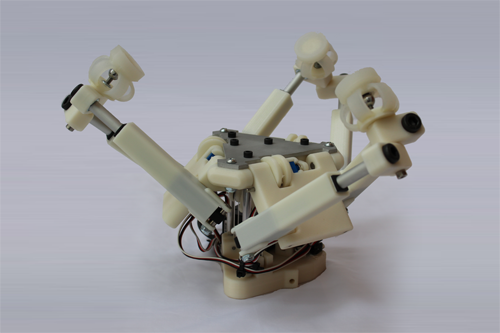
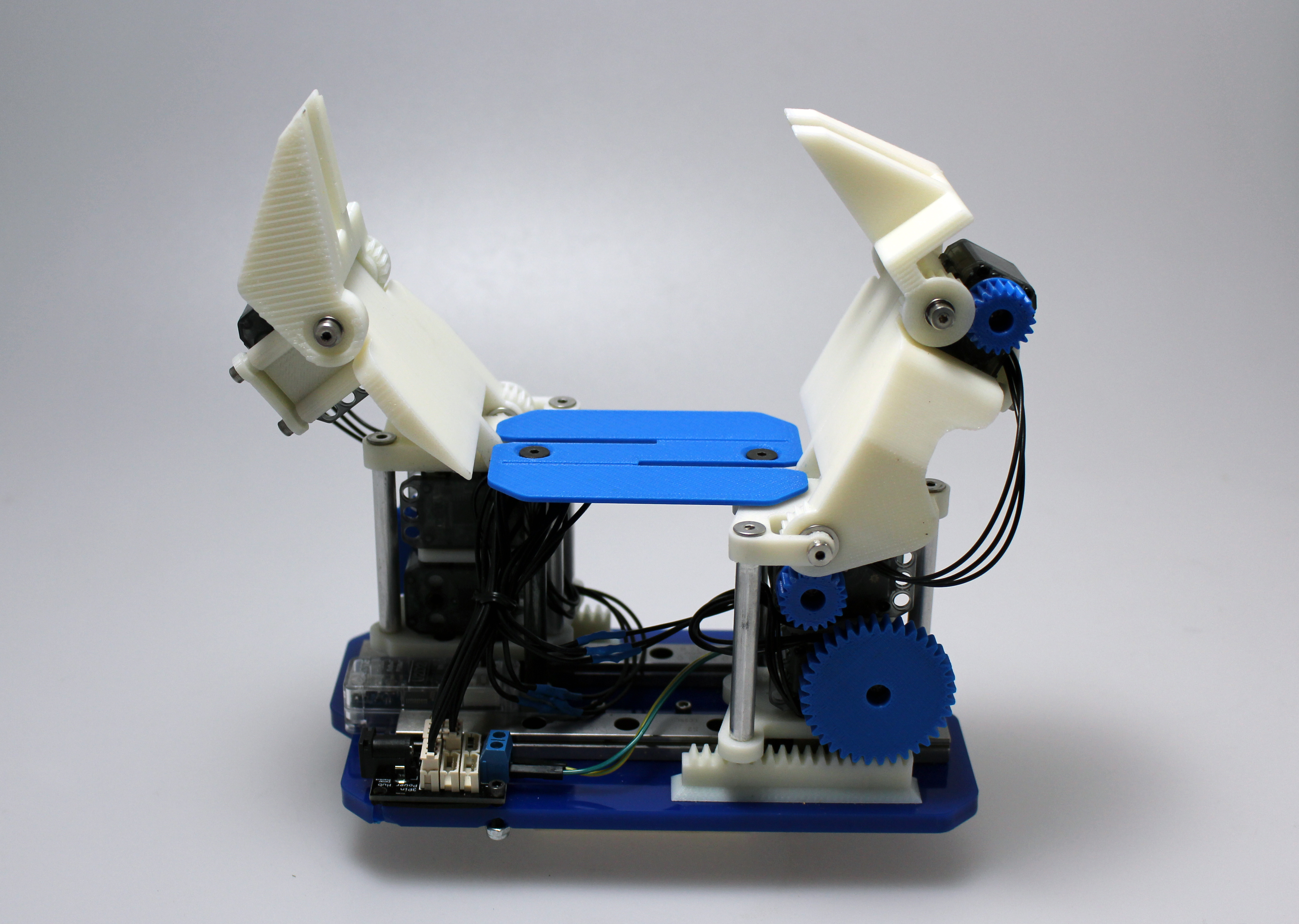
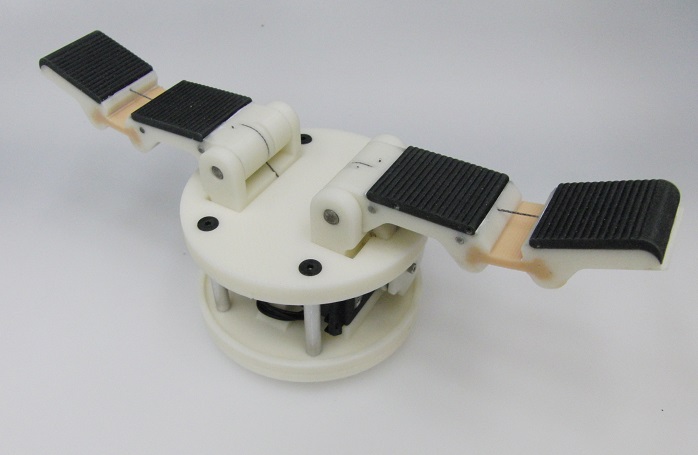
The Stewart Hand is a dexterous hand designed for 6-DOF within-hand manipulation. Its non-anthropomorphic design draws inspiration from the Stewart-Gough platform parallel mechanism. This simple kinematic structure allows for straightforward, accurate control with minimal sensing.
Based on the original SDM Hand, the Model T is the OpenHand Project's first released hand design, initially introduced at ICRA 2013. the four underactuated fingers are differentially coupled through a floating pulley tree, allowing for equal force output on all finger contacts.
A more dexterous alternative to the Model T, the Model T42 incorporates two underactuated, flexure-based fingers, each driven independently by either a Dynamixel or hobby servo. This type of hand has been shown to be adept at both in-hand manipulation and precision grasping.
Based on our lab's work with iRobot and Harvard on the iHY hand, which won the DARPA ARM program, the Model O replicates the hand topology common to several commercial hands, including ones from Barrett, Robotiq, and Schunk (among others). A commercial version of this hand is currently for sale by RightHand Robotics.
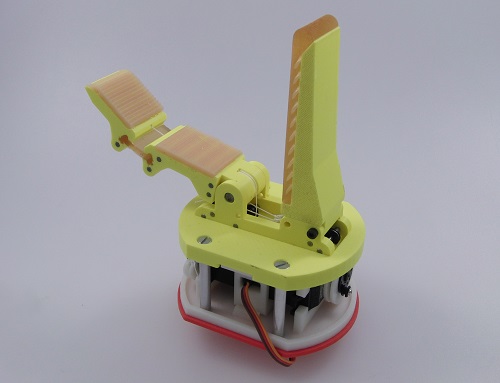
The Multi-Modality (M2) gripper employs a single underactuated finger driven by both agonist and antagonist tendons, as well as a modular thumb that can be swapped out for different tasks. The actuated finger may exhibit either underactuated or fully-actuated behaviors, depending on the actuation scheme. A single-actuator version (Model M) is also available as a minimalist design alternative.

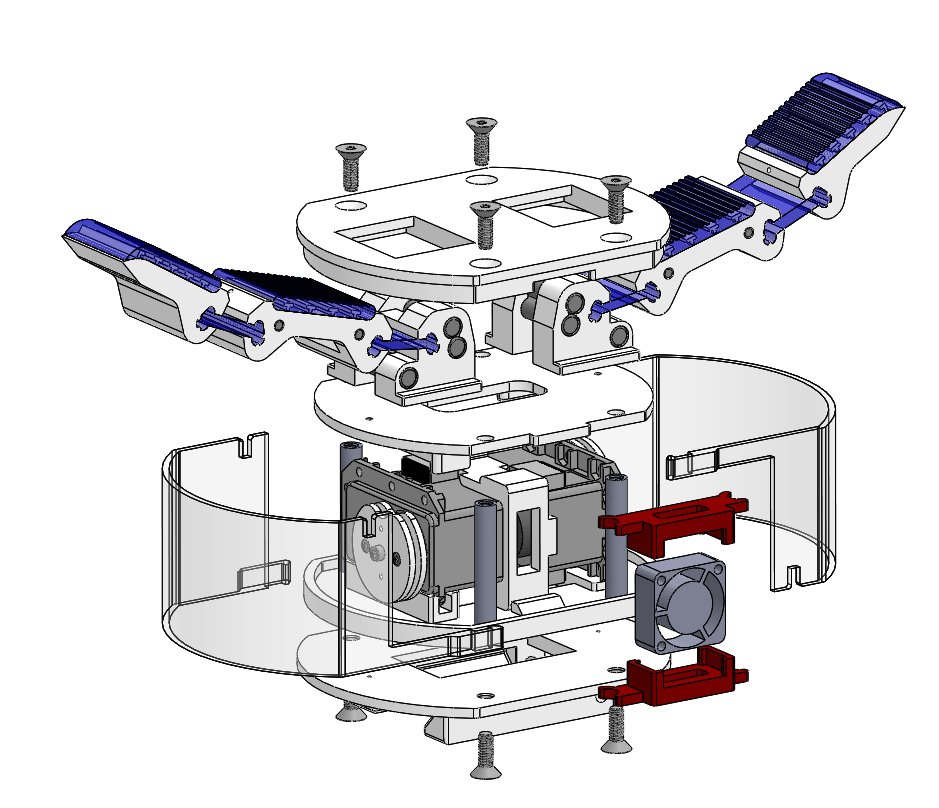
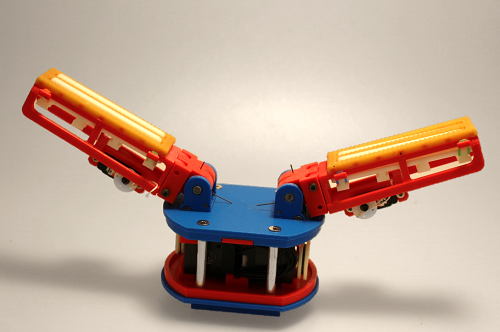
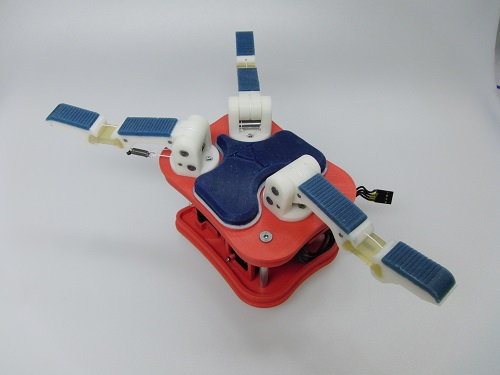
The Sphinx hand is designed for 3-DOF spatial in-hand rotation manipulation. It is based on a spherical parallel architecture and can both grasp and rotate a wide range of objects about a known fixed point independent of the object shape, pose, or grasp.

The Model F3 is an adaptation of the flexure-flexure version of Model T42. This hand is designed to enable contact force estimation based on gripper deformation using a wrist-mounted camera.
To accommodate the hands listed above, we also provide the designs for a set of mechanical couplings compatible with several of the most popular (and documented) robotic arm platforms.
Please direct suggestions, comments, or inquiries to v.patel[at]yale.edu or subscribe to our mailing list for occassional updates and news!

Prof. Aaron M. Dollar
Professor of Mechanical Engineering, Yale University
BS UMass Amherst, PhD Harvard, Postdoc MIT

Vatsal V. Patel
Graduate Student, Yale University
BS, MS University of California - Berkeley

Dr. Lael U. Odhner
Co-founder at RightHand Robotics
BS MIT, ScD MIT, Postdoc Yale

Dr. Raymond R. Ma
NASA JPL
PhD, MS, MPhil, Yale University
BS Meche MIT, BS EECS MIT

Dr. Walter Bircher
Amazon Robotics
PhD, MS, MPhil, Yale University
BS University of Nebraska-Lincoln, MechE

Dr. Andrew (Andy) Morgan
Boston Dynamics AI Institute
PhD, MS, MPhil, Yale University
BE Youngstown State University, EE
BS Youngstown State University, CS
Undergrads
Dan Rathbone (Fall 2012)
Josh LePine (Summer 2013)
Tyler Smith (Summer 2013)
Steven Rofrano (Fall 2013)
Nathan Ahn (Summer 2019)
Laszlo Kopits (Fall 2019)
