|
|
Underactuated Mechanisms |

|
|
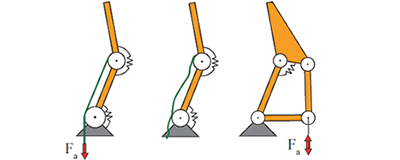
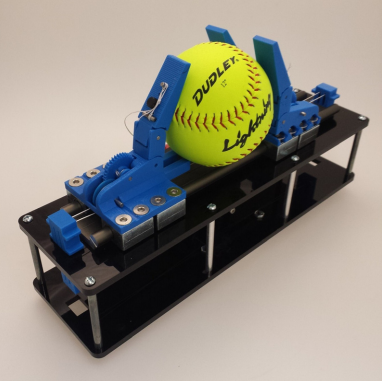
Underactuated mechanisms are often employed in mechanical systems in order to allow for the passive accommodation of environmental constraints and disturbances while reducing sensing and hardware complexity. For example, underactuated differential transmissions are utilized on almost all automobiles in order to allow wheels driven by the same drive shaft to rotate at differing rates to accommodate for turning without loss of traction. In recent years, the robotics community has increasingly exploited the concept of underactuation in robotic devices. This is particularly true in the domain of robotic grasping and manipulation where an underactuated robotic hand's passive adaptability enables the hand to increase the number of links in contact with an object, thereby providing better control over the grasp. Our work in this area aims to better understand and exploit the mechanical response and behavior of underactuated mechanisms and fingers.
Sample Publication:
Lael U. Odhner, Leif P. Jentoft, Mark R. Claffee, Nicholas Corson, Yaroslav Tenzer, Raymond R. Ma, Martin Buehler, Robert Kohout, Robert D. Howe, and Aaron M. Dollar
A Compliant, Underactuated Hand for Robust Manipulation, International Journal of Robotics Research, vol. 33(5), pp. 736-752, 2014.
Dexterous Manipulation
Robotic Grasping
Underactuated Mechanisms
2014
All Underactuated Mechanisms Publications >>
|