|
|
Prosthetic Wrists |
|
|
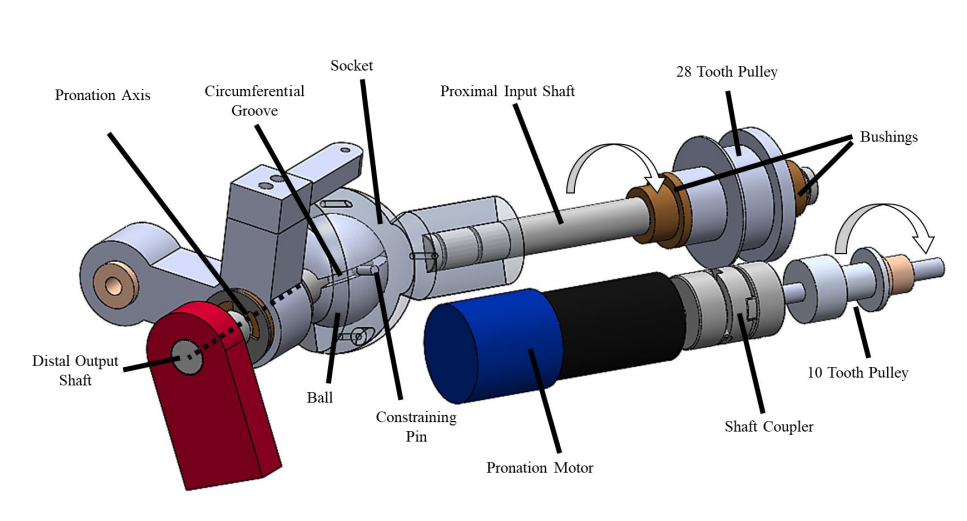
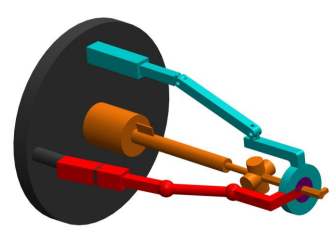
The spatial orientation of an end effector such as a hand or gripper is closely tied to its ability to perform a desired task, and nearly all robotic and prosthetic arms incorporate some type of wrist for this purpose. Yet both the academic and industrial research communities have tended to place more focus on hand/gripper development than that of wrist systems. Recent prosthetics investigations, however, have shown that increased dexterity in wrist prostheses may contribute more to manipulation capacity than a highly dexterous terminal device with limited wrist capability. The role of the wrist becomes particularly significant when using a simple end effector, or when an object fully constrains the fingers of the hand, such as during a cylindrical grasp. Our work investigates the design and implementation of novel prosthetic wrists.
Sample Publication:
Neil Bajaj and Aaron M. Dollar
Design and Preliminary Evaluation of a 3-DOF Powered Prosthetic Wrist Device, proceedings of the International Conference on Biomedical Robotics and Biomechatronics (BioRob), 2018.
Wrist
Prosthetics
2018
Neil Bajaj and Aaron M. Dollar
Kinematic Optimization of a Novel Partially Decoupled Three Degree of Freedom
Hybrid Wrist Mechanism, proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2018.
Wrist
Prosthetics
2018
All Prosthetics Publications >>
|