|
|
Legged Robots |
|
|
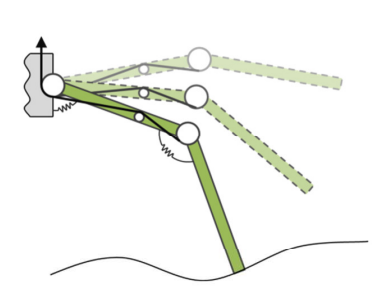
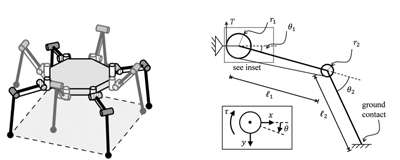
Currently, the majority of efforts at designing robust legged robots fall into two categories. The first make use of complex, fully-actuated legs and extensive sensing networks to precisely control foot placement and forces to ensure robot stability. The best example of such a robot is perhaps Boston Dynamics' Atlas robot, and while it certainly exhibits impressive performance and robustness, this comes at the cost of size, weight, complexity, and power requirements. The robots in the second category make use of simpler compliant legs and open-loop control to walk, and while these achieve decent performance, there is definitely room for improvement. Some examples of this class of robot include the iSPRAWL and RHex family of robots. Our goal is to use adaptive underactuation in the leg mechanisms to build legs that can passively adapt to the varied terrain below them without imparting significant disturbance forces to the body of the robot. We envision a six- or eight-legged robot thats tranfers its weight between two sets of legs in an alternating tripod or tetrapod gait. The use of between-leg coupling allows all of the robot's legs to make contact before significant forces are transferred to the robot's body.
Sample Publication:
Oren Y. Kanner, Nicolas Rojas, Lael U. Odhner, and Aaron M. Dollar
Adaptive Legged Robots Through Exactly Constrained and Non-Redundant Design, IEEE Access, vol. 5, pp. 11131-11141, 2017
Legged Robots
2017
All Legged Robots Publications >>
|