|
|
Flexures |

|
|
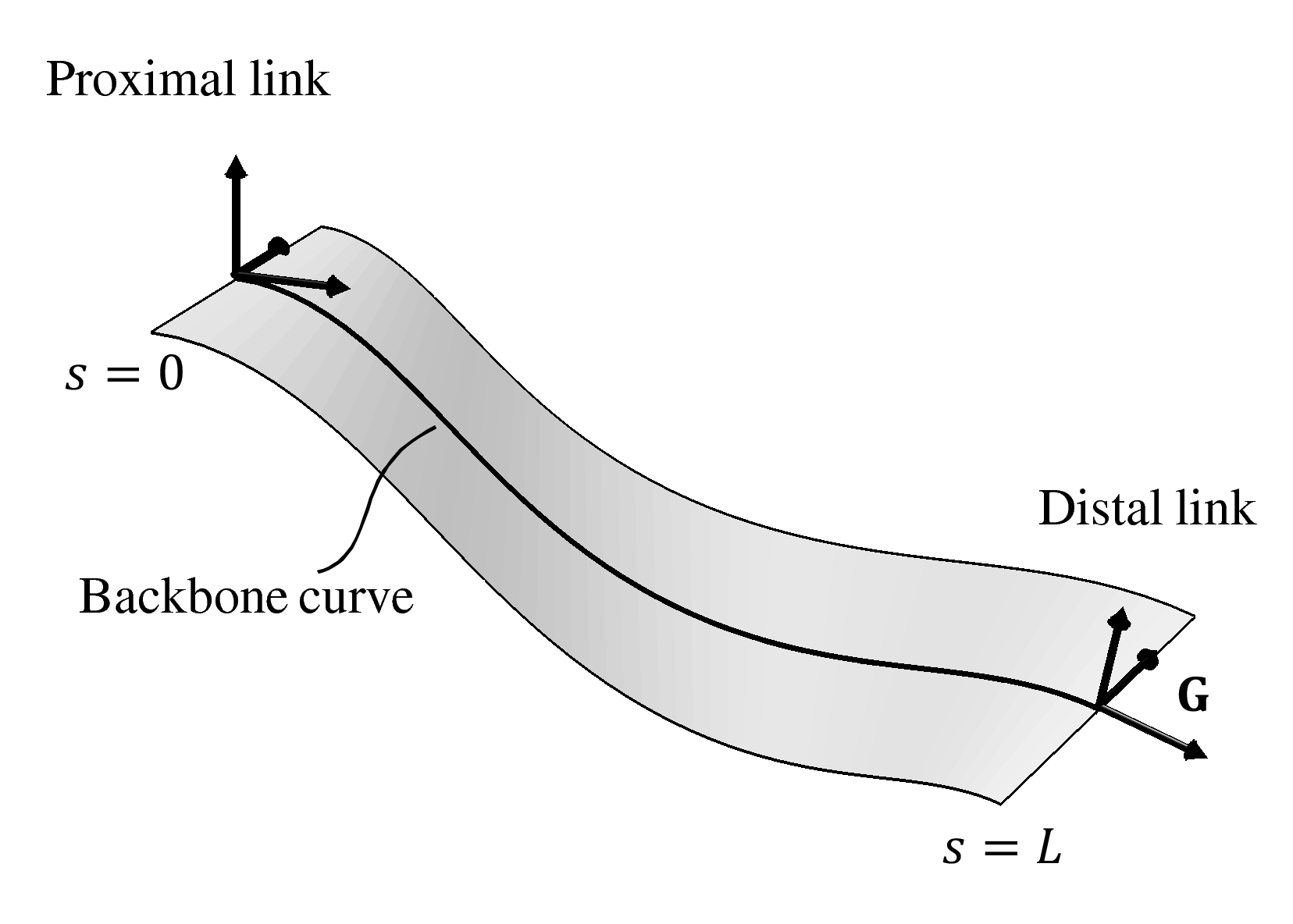
One significant challenge facing the robotics community is developing computationally efficient models for the physical behavior of non-traditional mechanisms, such as flexure joints. This is a difficult problem because these joints often bend to very large angles (90 degrees and more), so small-deflection beam models are of limited usefulness. We have been developing new and comprehensive methods of modeling robots having highly flexible members such as flexure joints, based on parameterized smooth functions describing the “backbone” of the joint. These new models serve as drop-in replacements for more traditional pin or prismatic joints, and can be integrated into the classical rigid-body manipulator equations for analysis and control.
Sample Publication:
Lael U. Odhner and Aaron M. Dollar
The Smooth Curvature Model: An Efficient Representation of Euler-Bernoulli Flexures as Robot Joints, IEEE Transactions on Robotics, vol. 28(4), pp. 761-772, 2012.
Modeling of Flexural Joints
2012
All Flexure Publications >>
|