|
|
Body Compensation in Prosthesis Use |
|
|
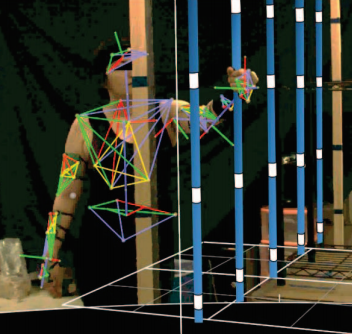
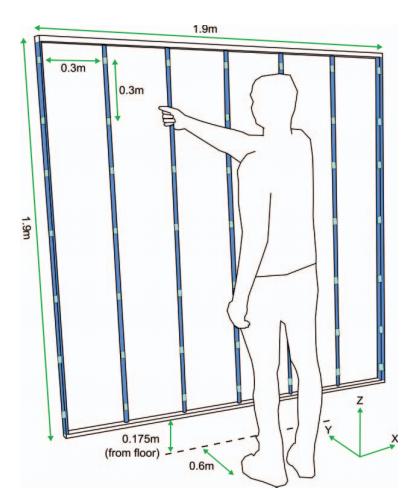
Developments in the field of upper limb prosthetics often focus on creating more dexterous prosthetic terminal devices, to replace the absent hands of amputees and facilitate object holding and grasping. This is demonstrated by the wide range of anthropomorphic prosthetic hands generated by industry, academia and hobbyists. In comparison, there has been fairly little attention given to the development of prosthetic wrists, despite the fact that this part of the body is also absent in many amputees. It is common for abovewrist amputees to be fitted with prosthetic devices that either have no wrist, or only a passive pronation/supination mechanism that must be rotated by the other limb or some environmental feature. This effectively fixes the alignment of their prosthetic device with regard to their forearm. Such an absence of wrist mobility limits the orientation capability of the hand relative to the body. In order to achieve the same target hand orientations necessary for grasping a variety of objects, it is necessary to modify the motion trajectories of other joints. This leads to compensatory movements, which can place additional stress on the body and lead to overuse complications for the remaining joints. Our work focuses on characterizing motion compensation over the reachable workspace of the human arm.
Sample Publication:
Adam J. Spiers, Yuri Gloumakov, and Aaron M. Dollar
Examining the Impact of Wrist Mobility on Reaching Motion Compensation across a Discretely Sampled Workspace, proceedings of the International Conference on Biomedical Robotics and Biomechatronics (BioRob), 2018.
Amputees
Wrist
2018
All Human Grasping and Manipulation Publications >>
|