|
|
Leg Biomechanics |

|
|
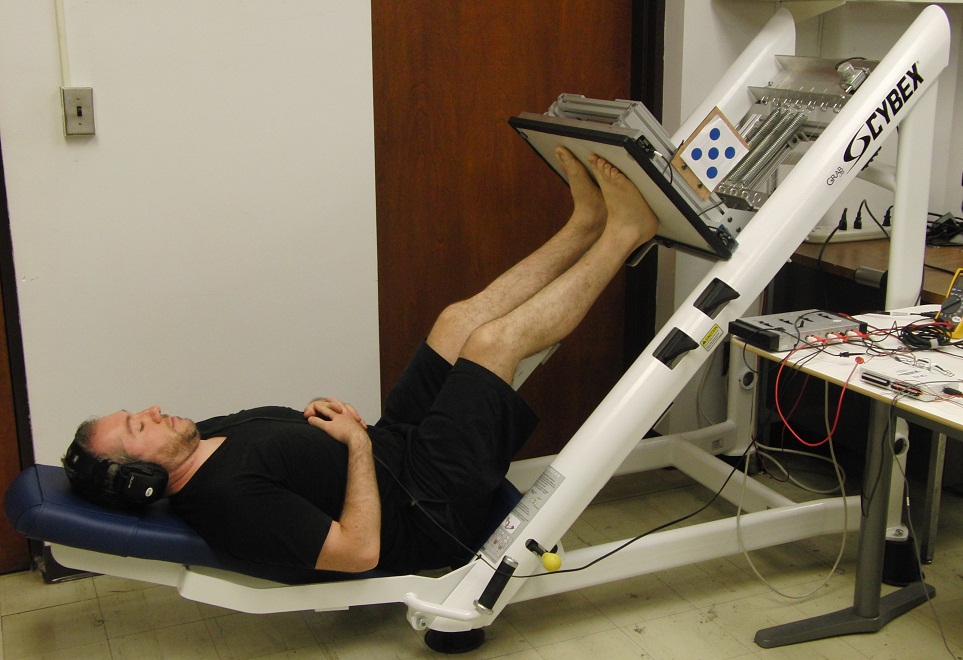
Human locomotion has been studied in depth, but there is still a lack of understanding of how humans control the musculoskeletal system during locomotion. Understanding humans control the biomechanical properties of the legs is important from a basic science perspective, but also for the design of assistive devices such as lower limb exoskeletons. Many studies have investigated hopping and running (bouncing gaits) showing that the overall body mechanics can be described by a spring-mass system. We aim to investigate leg properties in tasks for which legs are subjected to the effect of loads and also how humans respond to external assistance as that of exoskeletons or active orthoses. These tasks are similar in nature to the stance phase of gait, lifiting an object from the ground, or standing up from sitting on a chair. A more in depth understanding of leg biomechanics can further our knowledge on how humans control bimechanical properties of their legs. This line of reaserch is important from a rehabilitative standpoint because can help to define criteria for rehabilitative treatements and the design specification of assistive devices used in clinical and rehabilitative practice. It is also important because it is not fully understood how humans modulates leg biomechanical properties during locomotion and also when interactive with assistive devices that are meant to provide external forces and joint moment to reduce leg effort or to provide missing limb function.
Sample Publication:
Massimo Cenciarini and Aaron M. Dollar
Biomechanical Considerations in the Design of Lower Limb Exoskeletons, proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics (ICORR), Zurich, Switzerland, June 29-July 1, 2011.
Leg Biomechanics
2011
All Leg Biomechanics Publications >>
|