|
|
| ICRA 2013 Tutorial - Fabrication Techniques for Open-Source Robotic Hands
May 6, 2013, Karlsruhe, Germany |
Introduction
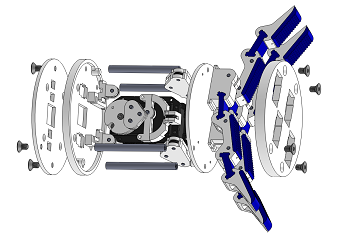
We would like to invite ICRA attendees to participate in our half-day tutorial on the afternoon of Monday, May 6th. This hands-on session will focus on walking participants through the process of fabricating a complete version of our open-source adaptive robotic hand based on the SDM Hand [1] design. The hand, which is the first in a series of modular hands/fingers that our lab plans to release, can be completely fabricated using a combination of 3D-printed parts (FDM is recommended) and off-the-shelf components for between $300-$700 (depending on how printed parts are fabricated), and requires fairly minimal effort for post-processing and assembly. The design and fabrication process of the hand are described in detail in an accompanying ICRA 2013 conference paper [2].
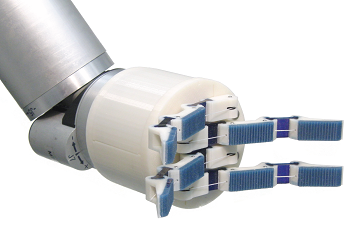
Tutorial participants will work in groups to fabricate the OpenHand Model T Hand (performance demonstrated in this video), our first open-source hand release. Additional modular finger designs will be forthcoming within the month, and eventually more dexterous hand configurations. The hand designs are made freely available for non-commercial applications.
The goal is to have participants leave the tutorial fully trained to fabricate the complete hand at their home university. During the tutorial, emphasis will be placed on walking participants through the “trickier” phases of the fabrication process, including:
• Degassing and pouring urethane finger pads and flexures
• Precisely installing press-fit pins
• Drilling guided holes into 3D printed parts (likely just video demonstration)
• Assembly of 3D printed parts
• Calibrating 3D printed models to compensate for variability in 3D printers (if necessary)
Participants may keep the sample parts they create during the tutorial as examples for future reference.
Video of open-source hand grasping capabilities
References
[1] Aaron M. Dollar and Robert D. Howe, The Highly Adaptive SDM Hand: Design and Performance Evaluation, International Journal of Robotics Research, vol. 29(5), pp. 585–597,2010.
[2] Raymond R. Ma, Lael U. Odhner, and Aaron M. Dollar, A Modular, Open-Source 3D Printed Underactuated Hand, proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA 2013), Karlsruhe, Germany, May 6-10, 2013.
|
Tutorial Schedule
This tutorial will run half-day on Monday, May 6th, from 14:00 until 17:30 with a coffee break.
Registration
Anyone interested in attending this tutorial should contact Lael Odhner. Registration is important, because we need to know how many parts to provide for participants. To encourage prompt registration, anyone who registers before 15 March will be entered in a drawing to take home a fully finished kit of hand parts (everything needed to operate the hand except the servo motor).
Overview of Topics
The tutorial will be organized around five mini-modules which teach fabrication processes by making and assembling components of the open-source hand:
|
Calibrating For Your 3D Printer
3D printers produce parts with varying dimensions, which makes close fit parts such as mating components and press-fit pins difficult to assemble. We will discuss how to make fixtures for calibrating a 3D printer, and design tips for automatically adjusting part models to account for printer-specific tolerances. CAD files for these fixtures will be available on the website after the tutorial.
Compliance and Press Fits
Printed mechanisms are often much more compliant than similar, conventional mechanisms due to the materials used. This can cause problems in assembly, such as the deflection of cantilevered features. We will show how small moving parts can be redesigned or assembled using jigs to avoid common failures, such as "pinching" joints.
|
Soft rubber overmolding
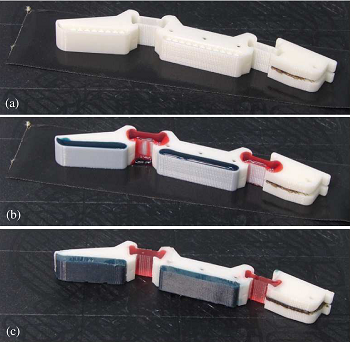
Many parts, such as wheels, fingers and palms benefit from having soft rubber tread or pads overmolded onto their surfaces. We have developed a straightforward method of molding these features onto 3D printed parts, which participants can try for themselves at the tutorial session. The fabrication of rubber flexure hinges will also be covered, allowing the creation of moving assemblies similar to those created with Shape Deposition Manufacturing, such as the SDM Hand and Sprawlita. Strategies will be presented for avoiding common failure modes, such as delamination and bubbling
|
Holes and Threads
Small-diameter holes and threaded holes are often difficult to produce on 3D printers. We will discuss strategies for fabricating these features, including the development of drilling jigs and incorporation of threaded inserts.
Tendon Routing
Friction caused by rubbing against relatively soft 3D printed plastic parts can cause a robot to fail in a number of ways. We will introduce a few ways of dealing with this problem, including routing over pins and the incorporation of tendon sheaths into a design.
Tutorial Organizers
Lael U. Odhner (lael.odhner@yale.edu)
Raymond R. Ma (raymond.ma@yale.edu)
Aaron M. Dollar (aaron.dollar@yale.edu)
|