|
|
Dexterous Manipulation |


|
|
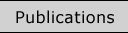
The ability to use the fingers to manipulate a grasped object held within the fingertips, often called "precision manipulation," is an important functionality extending the utility of robotic hands beyond simply acquiring and holding objects (i.e. grasping). Such motions are useful for making fine adjustments to the position and orientation of grasped objects and negotiating singularities/joint limits and environmental obstacles, among others. However, precision manipulation is challenging, in part because the hand/object configuration is typically over-constrained and requires redundant control schemes to address. This is further complicated in the common situation where the precise object geometry and/or fingertip contact locations are not known, making the execution of manipulation movements extremely difficult. However, some of these challenges can be overcome using hands with underactuated or compliant elements, which can relieve the problem of overconstraint, and provide grasp stability even when contact location and object properties are unknown. Thus, our work focuses on expanding the capability of mechanically simple robotic hands to perform manipulation, using simple control schemes and minimal sensing.
Sample Publications:
Lael U. Odhner and Aaron M. Dollar
Stable, Open-Loop Precision Manipulation with
Underactuated Hands, International Journal of Robotics Research, vol. 34(11), pp. 1347-1360, 2015.
Dexterous Manipulation
RoboticGrasping
UnderactuatedMechanisms
2015
All Dexterous Manipulation Publications >>
|